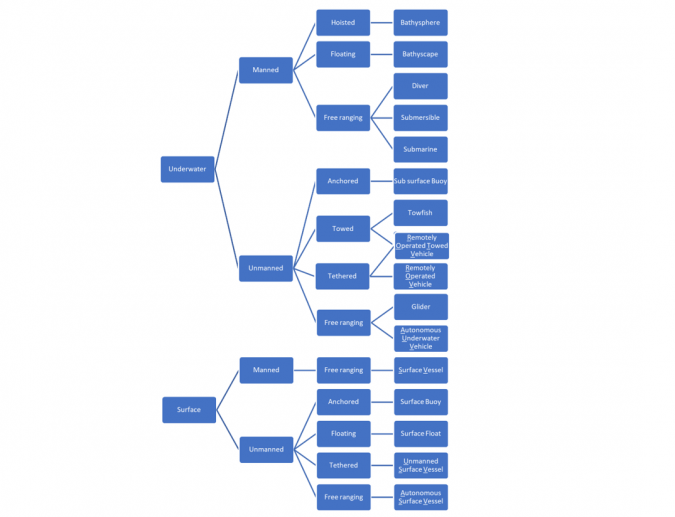
A classification of survey platforms
Zooming in on the range of vehicles for hydrographic surveying
The life of a hydrographic planner used to be easy: you had a survey vessel from which (at least in nautical cartography) you deployed a number of survey boats (often sloops) with a simple sensor suite. However, the growth in different types of survey platforms and sensors and their accompanying abbreviations in recent decades necessitates some form of classification. While there are as many classification systems as people with imagination, in this article I present a system that I find usable in the surveying business.
Classification
The classification chosen is:
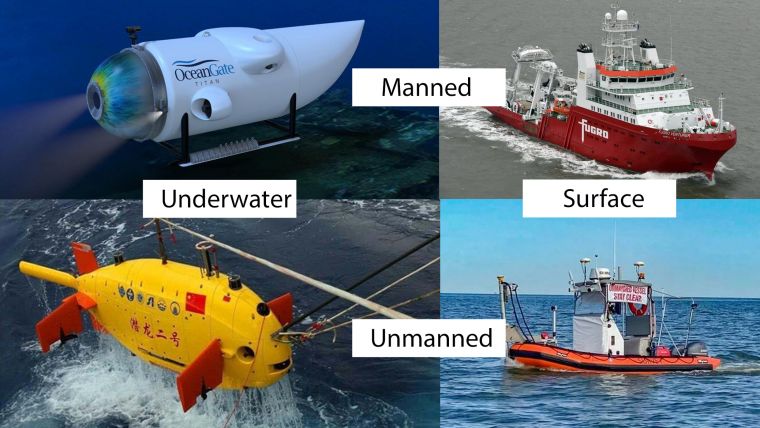
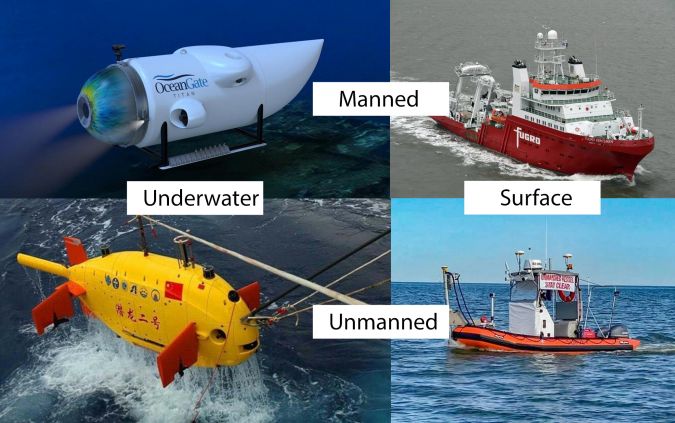
- Medium: where is the platform (air, water surface, underwater)?
- Manned/unmanned: does the platform have a crew?
- Freedom of movement: how much freedom of movement does the platform have?
- Degree of autonomy: how much autonomy does the platform have?
- Environment: which environment can the platform be used in?
- Size: what is the relative size of the platform in its class?
Medium
A first classification for survey platforms is the medium they operate in, or on, as this determines where the platform will be during the survey and which acquisition sensors and positioning systems can be used. In hydrography, we distinguish between air, water and the air-water interface. In the air, we find platforms such as manned helicopters, aeroplanes and satellites, but also unmanned aerial vehicles (UAVs) – commonly called drones – which also come in a multicopter form or with fixed wings.
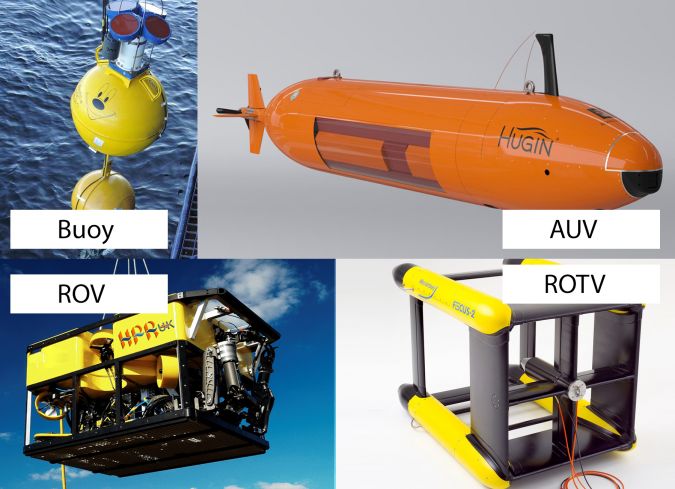
More traditional hydrographic platforms are found on or beneath the water surface, and include survey vessels, boats and buoys, as well as remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs) and towfishes.
Manned/unmanned
The second classification concerns whether the platform requires a crew or not, both above and under water. While underwater unmanned platforms such as ROVs have been the norm in surveying for several decades, a gradual shift is taking place above water: from traditional manned survey vessels to unmanned survey vessels (USVs).
Freedom of movement
The third classification considers the operational freedom of the platform, ranging from ‘fixed’ platforms such as buoys through towed platforms to free-ranging platforms such as submersibles, surface vessels and autonomous vehicles. The following sub-classification is used in this article:
- Anchored: the platform stays in one place (e.g. a buoy).
- Hoisted/towed: the platform is connected by a cable to a mother platform and has little or no control over its own position (e.g. a towfish). A special case is a remotely operated towed vehicle (ROTV), which combines a towed and a tethered platform to create limited freedom of movement.
- Floating: the platform relies on ‘nature’ to change location. A special case is the bathyscape, which has limited control over its vertical motion and floats horizontally.
- Tethered: the platform is connected to a mother platform but has some freedom of movement (e.g. an ROV (umbilical) and a USV (radio controlled)).
- Free-ranging: the platform can travel anywhere without external control and is limited only by its endurance and the environment.
Degree of autonomy
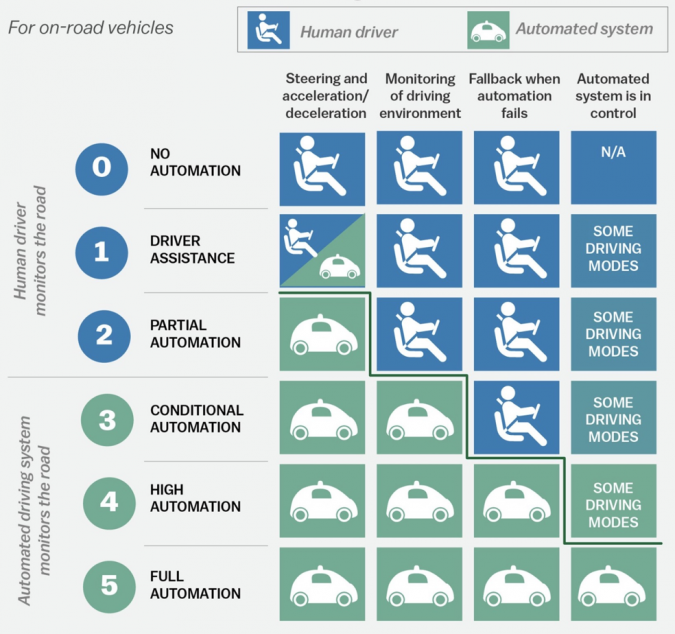
Closely related to freedom of movement is the fourth classification; the platform’s autonomy. A platform that is not free-ranging is by definition non-autonomous, as it requires an external force to move. Regarding the autonomy of free-ranging platforms, we can adapt the classification used for autonomous cars from SAE J3016:
- No autonomy: the platform is manned and manually controlled for both navigation and surveying operations.
- Operator assistance: part of the steering is controlled, for example using an autopilot to control the heading of a vessel or automatic recording at the start of a survey line. The human operator is still fully in charge.
- Partial automation: the platform can perform basic steering operations such as maintaining position using dynamic positioning or automatically steering a pre-defined line pattern and recording survey information while using automatic depth filters. The human operator still monitors and can take control at any time, for example if environmental conditions change unexpectedly.
- Conditional automation: the platform has environmental detection capabilities such as detecting other vessels or changing a survey pattern with changing depths. Human intervention is still required for critical actions or if the automation does not know what action to take. From this point onwards, remote control whereby an operator monitors multiple platforms is feasible.
- High automation: human intervention is no longer required in most circumstances. Vessels can automatically take avoiding action based on sensor input and/or design their own survey plans when circumstances change.
- Full automation: the platform takes care of all tasks under all conditions. No human interaction or monitoring is required.
Many autonomous surface vessels (ASVs) are at Level 3 or Level 4 for navigation, meaning they can take action themselves but require human intervention in specific circumstances. Most survey systems are however at Level 2, although nearing Level 3. The ASV as a total package can never be more autonomous than the lowest level, so Level 2 or at most Level 3.
Environment
The fifth classification is the environment that a platform is designed for. A submersible, ROV or AUV can be built for either shallow-water or deep-water operations. Research submersibles can have depth capabilities up to thousands of metres, while submersibles used for inspection work are limited to a few tens to a few hundreds of metres.
Surface vessels are also classified by the environmental conditions (specifically waves) that they can withstand, often in combination with their endurance. A common classification is inshore and offshore survey vessels. Inshore vessels operate in restricted, often shallow, waters with smaller waves, while offshore vessels can operate in large, open bodies of water with higher waves.
Size
Survey platforms come in sizes ranging from a few decimetres for a very small ASV up to over 100 metres for a manned surface vessel for deep ocean work.
The size of the platform is often determined by other classification choices. For example, most unmanned platforms will be smaller than their manned equivalents, and an inshore vessel is usually smaller than an offshore vessel. Larger platforms can carry more personnel, sensors or stores, for different types of operations or greater endurance.
An example: ROVs
To discover how this classification works in practice, let us consider the ROV. This boxy platform is commonly used for surveys underwater. It is unmanned, but requires an operator (pilot) to control the ROV from the mother ship to which the ROV is connected using a tether (umbilical). Most ROVs have at best Autonomy Level 2.
ROVs come in shallow-water versions for use on the continental shelf and deep-water versions for depths of thousands of metres. Finally, ROVs may be smaller, observation-class ROVs – carrying only cameras and small survey sensors – or larger, work-class ROVs – with manipulator arms and extensive survey suites. Sub-classes are also possible, such as small, medium or large versions of work-class ROVs.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















