Autonomous Drifting Echo-sounding Buoys
Drifting echo-sounding buoys will soon provide bathymetric control in inaccessible areas of the oceans. The SSPARR (Seafloor Soundings in Polar and Remote Regions) buoy project holds great promise for providing very low-budget bathymetry. Initial buoy implementation may be by hovercraft in the Arctic Ocean.
An interesting new concept in low-budget hydrography is the introduction of relatively inexpensive drifting buoys equipped with echo sounders. For over twenty years, as a member of GEBCO's Sub-Committee for Digital Bathymetry (SCDB), I have pondered ways in which soundings might be obtained using vessels of opportunity. But problems of navigation, transducer mountings, system tweaking and changing paper rolls made it mostly a dream. While some mid-ocean soundings certainly resulted, most efforts probably came to naught. However, the millennium brought with it the availability of high-accuracy GPS navigation, worldwide satellite data transmission via the Iridium system, and robust digital acquisition of the first bottom ping.
Origins in GEBCO
The SSPARR (Seafloor Soundings in Polar and Remote Regions) project had its beginnings during the annual GEBCO meetings (General Bathymetric Chart of the Ocean) between 2000 and 2002. The 2000 meeting at the Royal Danish Administration of Navigation and Hydrography in Copenhagen coincided with the announcement that GPS accuracy would increase greatly with the removal of Selective Availability. The 2002 meeting at the Center for Coastal and Ocean Mapping (CCOM) at UNH in New Hampshire followed the rebirth in 2001 of the Iridium satellite constellation, initi-ated in 1998 as Iridium Satellite LLC, and the anticipated availability of cheap transducers with the scrapping of excess US submarines. Robert M. Anderson (formerly Hawaii Institute of Geophysics, now with SAIC) took up the challenge in response to my annual prodding, and a proposal was submitted to the US National Science Foundation in 2003. Together with Dale Chayes and Val Schmidt at the Lamont-Doherty Earth Observatory of Columbia University, Mark Rognstad at the University of Hawaii/SOEST, and Larry Mayer at the University of New Hampshire/CCOM, Bob Anderson began the project in earnest in 2003 with prototype development funding from the NSF.
The idea behind SSPARR came from GEBCO, which in 2003 released its first high-resolution global bathy-metric and topographic grid with 1 spacing. For the past 103 years GEBCO has been the only group dedicated to compiling worldwide bathymetry. As little more than 10% of the world oceans have been ad-equately mapped, much use has been made of bathymetric predictions based upon satellite altimetry. However, since the measured sea-surface slope or tilt is primarily a function of the gravitational pull of the underlying oceanic basaltic basement, a fairly representative distribution of actual measurements is required to calibrate the predictions and account for the overlying lower density blanket of marine sediments.
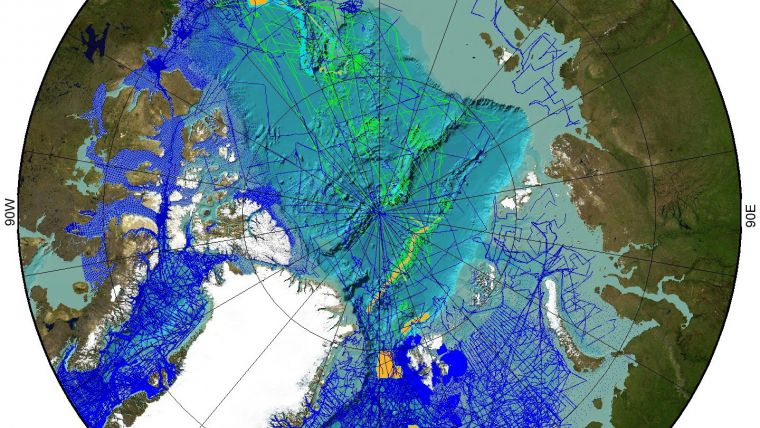
Three areas in the world oceans have extremely sparse sounding coverage. These are the circum-Antarctic, the south-eastern Pacific, and the Arctic Ocean. Walter H.F. Smith, GEBCO SCDB chairman, has noted that the southeastern Pacific track coverage is similar to the US interstate highway network. It is doubtful if elevation measurements over these roads would reveal the Rockies and Appalachians as continuous mountain chains, or the Mississippi River Valley as a single feature. Depth measure-ments from autonomous buoys placed in these areas and carried along by winds, currents, and even moving ice, could contribute greatly to our understanding of these vast and inaccessible areas.
Concept and Design
The design and development progress of the buoys has been discussed by Anderson (2004) and Anderson et al. (2003, 2005). The development prototype consists of a battery-powered buoy with single-beam omni-directional 12kHz sounder, GPS navigation receiver, data-acquisition system, Iridium bi-directional radiotelemetry system, and a battery good for about three years. Plans calling for the emplacement of numbers of buoys by 2007 for the International Polar Year have slipped, and parallel efforts are now underway by a company in Norway. The expected cost of a buoy with a diameter of 6 and ~40kg weight is US$2-3,000.
The beauty of the concept is the availability of a buoy able reli-ably to measure depth to 5,000m (with slightly degraded performance in deeper water). It could be programmed to make soundings depending on rate of drift as measured by GPS, or according to the rate of change of the seafloor. By storing global grids, which now exist down to 0.5 (Becker and Sandwell, 2004), it could even increase sounding density when large deviations from the grid are noted. A bonus is information on the drift of ice or surface currents as indicated by the time-stamped GPS locations.
Arctic Application
In the Arctic Ocean buoy emplacement could be done from ice-breakers, aircraft landings, or submarine surfacing, none of which are efficient. In 2004 Yngve Kristoffersen at the University of Bergen in
Norway showed me a proposal put to the European Community in the early 1990s for using a hovercraft for Arctic research. Following some tests, the proposal was rejected.
I embraced the idea as a means to further investigate my 1960s thesis area over the Alpha Ridge, and to allow bathymetry in the Lincoln Sea, which has perennial 5-6m-thick ice.
Recently we decided to privately purchase a Griffon 2000TD hovercraft for a long-term programme of geophysical investigations in the deep Arctic Ocean, reminiscent of the permanent ice stations of the IGY half a century ago. In conjunction with the Canadian and Danish programmes for Article 76 of UNCLOS, we propose to install perhaps one hundred buoys in arrays perpendicular to the coast, to take advantage of the coast-parallel excursions of the ice as witnessed in the 1970-1974 excursions of
Fletcher's Ice Island (T-3).
How low is 'low-budget'? In the Arctic, for the purpose of comparison, a kilometre of sounding profile from an icebreaker like the USCGC Healy can be obtained every 6-20 minutes at a ship-time cost of US$150-500. Using a submarine the time is ~2 minutes and the cost ~US$50. With a SSPARR buoy the time would be ~8 hours (the 1970-1974 average drift for T-3 in the Lincoln Sea was 3.02km/day). With a lifetime of 3-4 years, and an acquisition cost of US$3,000 and US$500 each year for phone bills, the cost (US$4,750 for 3,860km) would be US$0.82.
Although the seemingly random drift track of the buoys is unlike conventional straight ship tracks, experience from drifting ice stations has shown that it can provide a good 3D representation of the seafloor. Arrays of buoys aligned perpendicular to the known average overall ice drift should provide excellent coverage. For the planned hovercraft operations, the periodic existence of long leads offers the possibility of obtaining standard 12kHz echo-sounding, 3.5kHz chirp, and low-frequency seismic profiles. The future availability of my EM1002 multi-beam offers the possibility of late summer swath mapping of the outer continental margins in the open waters off the southern and central Canadian Archipelago. For protection from storms the hovercraft has only to retire to the shore and seek higher ground.
Future Directions
Installation of the SSPARR buoy in the permanent Arctic ice pack requires that a hole of more than 6 diameter be drilled through multi-year ice, at a safe distance from open water or pressure ridges. The buoy is then frozen in, with the transducer suspended 10-20m below the ice. For an icebreaker this would be quite expensive, requiring 1-3 hours of ship-time for downloading the buoy and drill, and making the hole far from the icebreaker-caused breakage of the ice cover. Use of its helicopter would present a similar cost. For the planned hovercraft, whose long-term maintenance and fuel costs at maximum speed are ~US$100/hour, and which can operate over impenetrable multi-year ice with a moon-pool mounted ice drill, the cost is but a small fraction.
Since the buoys provide periodic fixes, a network would provide a synoptic view of ice deformation. The Arctic buoys might even be interrogated for position by submarines, to correct the persistent inaccuracy of underice polar navigation. Precision GPS time for all buoys suggests that side reflections from other buoys within 8-10km could increase sound-ing density.
Learn More
- www.ngdc.noaa.gov/mgg/gebco/guidingcommitteexx.pdf
- www.agu.org/meetings/fm03/fm03-pdf/fm03-OS42A.pdf
- www.agu.org/cgi-bin/SFgate/SFgate
- http://topex.ucsd.edu/www_html/srtm30_plus.html
- www.tos.org/oceanography/issues/issue_archive/issue_pdfs/17_1/17_1_Smith_et_al.pdf

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















