Detecting drowned bodies using an autonomous surface vessel
Key elements for improving sonar search operations
Rough conditions at sea can result in lost cargo, man overboard or even the sinking of vessels. The Netherlands Coastguard, supported by the Royal Netherlands Sea Rescue Institution (KNRM), the Central Information Technology unit of Rijkswaterstaat (RWS-CIV) and other partners, is responsible for the search and retrieval of lost items and people endangered or drowned at sea. The search for sunken objects or bodies is typically carried out using a hull-mounted or towed sonar. Such search operations generally cover large areas and require a lot of personnel, and are therefore costly. In the case of drowned bodies, the search is complicated by the drift of the body and the general challenge of identifying small targets in the sonar data.
Recent advances in autonomous surface vehicle (ASV) technology can improve the efficiency of search operations. While ASVs are currently used in ocean exploration and routine surveying, little research has been carried out into their value to search operations. In the Proeftuin op de Noordzee, a designated area for conducting field experiments, the Netherlands Organization for Applied Scientific Research (TNO) and Aquatic Drones have carried out tests to assess the contribution that ASVs equipped with a multibeam echosounder (MBES) can make to the search for drowned bodies in harbours and nearshore sea environments.
From crewed vessel to ASV-based search operations
Traditionally, a crewed vessel equipped with a low-cost sonar is used to search for drowned bodies. A trained sonar expert on the vessel guides divers to potential locations based on the sonar image. This is a time-consuming task. In most environments, wave motion and underwater currents cause drowned bodies to drift in a short time. This can extend the potential search area quickly and highly complicate the search. In contrast, an ASV sails autonomously, allowing the sonar expert to analyse the data and make decisions onshore. Smart track-planning algorithms, incorporating environmental parameters such as sea state and current predictions, allow the ASV to update the mission plan while in progress. In addition, multiple ASVs can be deployed to increase the temporal and spatial coverage without significantly increasing the required personnel.

A successful search operation depends on the ability of the sonar to detect the body and the ability of the ASV to operate safely and successfully acquire high-quality sonar images. Water depth, sediment type, vessel heading (i.e. orientation between the body and the sonar swath) and seabed coverage are factors that influence a successful outcome. The range of the sonar and the ability of the ASV to follow the predefined path are critical for the acoustic coverage of the seabed. This research investigated the value of ASVs in search operations while also shedding light on the detectability of human bodies on the seabed.
Approach
The Phoenix 5 ASV from Aquatic Drones was used to conduct the tests. This ASV is equipped with an RTK antenna, which provides centimetre-level positioning accuracy, and a RESON T20 dual-head MBES, which provides bathymetric and backscatter data. The Teledyne PDS software was used to process the acquired data.
A CPR manikin was used to mimic a drowning victim. The body was deployed on the seabed at various water depths (2–9m) in Scheveningen harbour in muddy sediments and nearshore in more sandy sediments. The waypoints for the ASV were defined after the body had been placed on the seabed so that the ASV could sail several parallel lines over the body with different orientations. The sonar settings were tuned to achieve a high resolution (400kHz, FM pulse) but also a good coverage (160° opening angle). Both bathymetric and backscatter (i.e. snippet and sidescan sonar-like data) data types were acquired during all tests to assess the advantages and disadvantages of the different data types for detecting drowning victims.
Knowledge of the navigational accuracy of the ASV is crucial for ensuring full coverage of the seabed and therefore reducing the risk of missing the body. Furthermore, rough sea conditions can deteriorate the sonar data quality. To evaluate the performance of the ASV, the navigation and sonar perception capabilities were evaluated under varying environmental conditions. High-resolution METOCEAN (wind, waves and current) data were provided by the project partner SVASEK for this purpose for the selected test period.

Results
ASV navigation performance
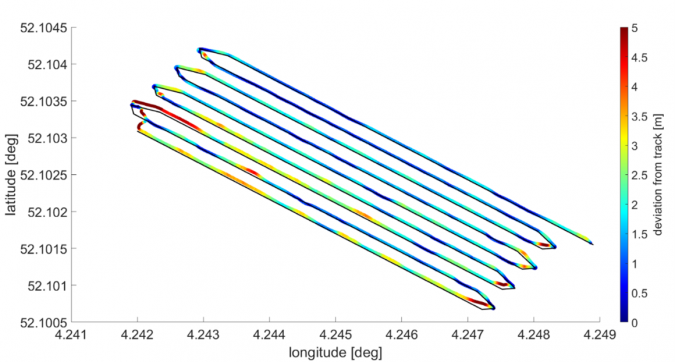
In the harbour survey (no waves, low wind, low current), which was used as a baseline survey, a mean track deviation of 0.9m and no drift of the ASV towards a particular side of the track were observed. During the different offshore surveys, the mean track deviation increased and varied between 1.1m and 2.6m with maximum deviations of >5m, depending on the sea state (wave height: 40 to 90cm, wave period: 4 to 8s, wind: 2 to 12m/s). An overall drift of the ASV to the northeast was observed, indicating a general drifting tendency towards the lee side of the wind, waves and current. The expected magnitude and direction of the deviation from the planned track should be taken into account when planning multibeam ASV surveys, in particular to ensure that search operations cover the entire area.
Detectability of CPR manikin
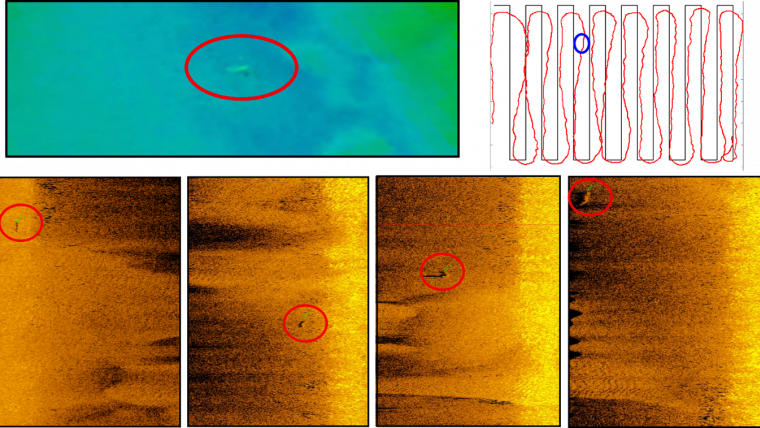
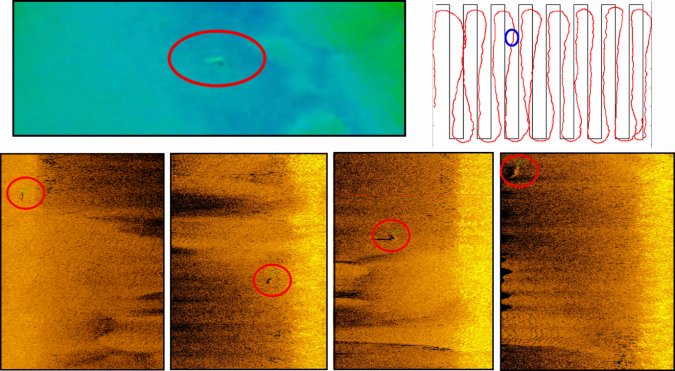
The CPR manikin was detectable on the seabed, but with certain limitations. First, the contrast between the seabed and the manikin was higher in the backscatter snippet data and outperformed the sidescan-like data type. As a result, we decided to only use the MBES backscatter snippet and bathymetry data for identification. The clearest detection, in both bathymetry and backscatter data, was achieved in shallow water (around 5m) with sandy seabeds and track lines parallel to the longitudinal axis of the body. In deeper waters (around 9m), the manikin was still visible in the bathymetric data, whereas the backscatter data no longer provided useful information.
Considering the environments in the study area, the bathymetry was generally the better data type for identifying a body on the seabed. Even though backscatter theoretically has a higher resolution than bathymetry, several factors (sediment, depth, incident angle, track line orientation, morphology) affected the backscatter more than the bathymetry. While the backscatter worked very well in sandy and shallow environments at all ground ranges (incident angles) except nadir (below the vessel) (Figure 4), the bathymetry also worked well in muddy and deeper waters as well as at nadir. The bathymetric detection of the elevated body was independent of the sediment type (except when it sank into mud), whereas the success of backscatter in detecting a body depended on the contrast with the surrounding seabed (except for higher incident angles when an acoustic shadow was produced).
Theoretically, bathymetry is a good predictor up to the point where the resolution is no longer sufficient to resolve the body. Based on the capabilities of the RESON T20 dual head and the deepest manikin location of 9m and the outer part of the swath, the resolution is around 1m2. Considering only the inner part of the swath or decreasing the swath width increases the resolution but decreases the coverage. In addition, a single orientation of the track line seemed to be sufficient for detecting the body based on bathymetry. For backscatter imagery, the track line needed to be more or less parallel to the longitudinal axis of the body to cause a detectable acoustic shadow. Since the bathymetry detects the body based on elevation and the bathymetry resolution is similar across-track and along-track, the elevated body can be detected independently of the orientation of the track line.
To clearly distinguish the body from noise and outliers, a combination of both datasets is highly recommended. More than one track line orientation is also suggested, to increase confidence in the detection. As observed in the harbour, which is a highly dredged area, detection of a body can also be hampered by strong morphology.
The way forward
Smart track planning and automatization of the search are further key elements for improving ASV and sonar (e.g. MBES) search operations. Sea state and current prediction can feed into smart and real-time track planning, reducing the risk of missing a body, while an automated target detection algorithm would allow detection of a body while the search is in progress. In particular for moving targets, such as a body in a highly dynamic environment, the ASV must be equipped with an identification capability. A promising candidate would be an ROV with cameras, which could instantaneously verify the reported sonar detection and provide the diver with accurate and updated information about the location of the body. This would require a larger ASV that supports ROV deployment.
As shown in this research, the detection performance decreases with increasing water depth, and the application of an ASV with a hull- or pole-mounted sonar is limited to shallow water. For deeper waters, an ASV with a towed system or an AUV could overcome this limitation.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















