Hydrographic Surveying: Where Do We Stand?
The Ever-increasing Accuracy of Mapping Surface Waters
Hydrographic surveying is highly specific and requires a suite of advanced acquisition and positioning sensors attached to a mobile survey platform as well as sophisticated software to allow the correct combination of all the data. For those in the industry, the advances over the last decade may feel more like an evolution rather than a revolution. If we look back one, two or even three decades, we can see the enormous leap that hydrographic surveying has taken. Where do we stand, and what can we expect for the near future? In this article, we compare the present with the past and try to provide insight into the near and more distant future.
Multibeam and the Hydrographic Survey Industry
When it comes to data acquisition, hydrographic surveyors have always first and foremost been involved in bathymetric data. Coming from the lead and line, the acoustic single-beam echo sounder became the standard in the 1920s and 1930s. In the late 1980s, we saw the introduction of the first commercial multibeam systems such as the Simrad (now Kongsberg) EM100 and Reson (now Teledyne Reson) 9001. Single-beam echo sounding was still the standard with multibeam being a very expensive tool. Over the last decade, multibeam has replaced single-beam echo sounders on many projects. At the lower end of the market, we now see cost-effective multibeam solutions that more than exceed those early multibeams, whereas at the higher end of the market, we see new multibeams with higher performance.
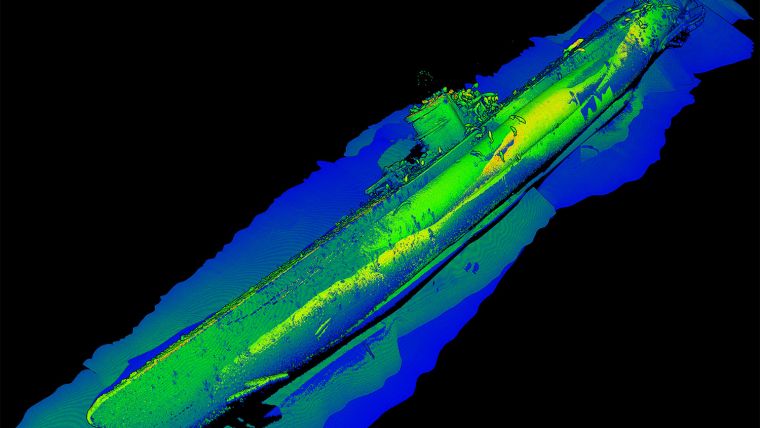
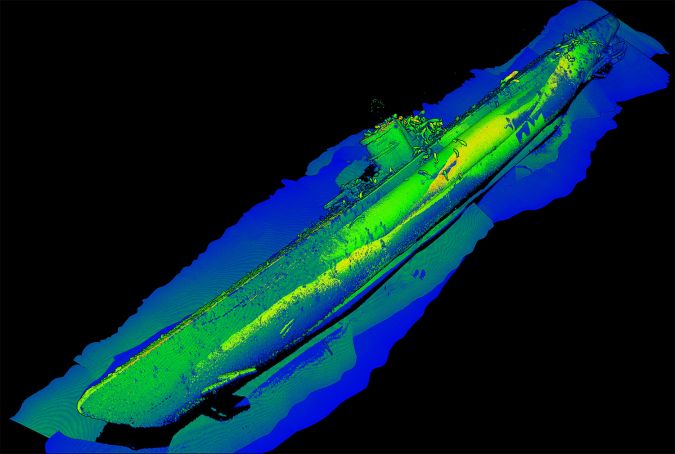
Besides the main development of cost reduction for entry-level multibeam systems, many of them now offer backscatter, side-scan sonar like data and water column imagery. These allow the user to not just map a bottom depth, but also map the intensity of both bottom returns as well as any return in the water column. The introduction of ever smaller beam widths, higher frequencies and larger swath angles means the hydrographic surveyor can capture more and more detail.
A modern, high-end, multibeam echosounder easily generates 50,000 depths per second in shallow water and at maximum settings with a millimetre resolution. Compared to, say, the original Reson Seabat 9001 with its 900 depths per second under similar conditions, this is more than a 50-fold increase in roughly three decades. In the same time the beam angle has decreased from around 1.5 degrees to around 0.3 degrees; an increase in detail of around five times.
Multibeam or a Side-scan Sonar
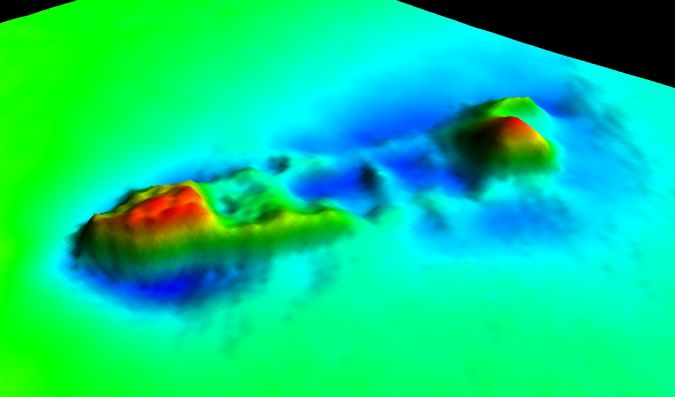
A side-scan sonar accompanied most bathymetric surveys three decades ago to scan between the sounding lines for any objects such as wrecks. With the greater use of multibeam echo sounders, the side-scan sonar is still around for those wishing to generate high-resolution imagery of the ocean floor or objects on it. But the side-scan sonar has also gone through a development making it capable of producing higher detailed imagery at speeds that are twice to three times those of the old days. Frequencies have also increased allowing even higher resolution imagery at the cost of shorter ranges. Finally, many side-scan sonar systems now also generate bathymetry making the distinction between multibeam and side-scan sonar even smaller than before. As a result, the choice between a multibeam or a side-scan sonar can become a matter of discussion within any survey company.
Laser Imaging and the Hydrographic Survey Industry
The early 1990s saw the introduction of the first bathymetric Lidar systems with the next step now being laser scanning. A recent development is the use of underwater laser imaging systems. These systems are comparable to the terrestrial laser scanners and are mounted on an ROV or set up using a tripod on the bottom. They generate high-resolution images of underwater objects such as pipeline valves or wrecks. Just as bathymetric Lidar, they are still restricted to clear water but the use of different colours of laser light has improved the achievable ranges somewhat for these systems.
GNSS and the Hydrographic Survey Industry
For centuries, positioning was performed using a sextant nearshore. With the introduction of electronic navigation systems, the sextant was slowly replaced on many projects but could still be found in use in the early 1990s. Three decades ago, GPS was introduced into the hydrographic survey industry. The workhorse of many hydrographic companies back then was the Sercel NR103, a ten channel, parallel differential GPS receiver. The mid-1990s saw the first introduction of carrier phase techniques such as RTK into the inshore/onshore surveying business. Surveyors used RTK together with their own base station. Offshore surveyors were happy to achieve a few metres of accuracy whereas inshore a few centimetres were achievable. Alternative positioning systems such as Hyperfix or a dedicated total station were still in use but slowly being phased out.
Over the last decades, GPS has become just one of four Global Navigation Satellite Systems (GNSS) together with Glonass, Galileo and Beidou. The accuracy of the techniques of old has slowly but steadily improved and is now about twice as good as 10 years ago for similar techniques. A modern GNSS receiver will have a few hundred reception channels but essentially still do the same thing but at greater speeds. Initialisation has come down from tens of minutes to just seconds and the output rates have gone up to tens of hertz instead of once a second.

In the early 2000s, the first Precise Point Positioning solutions became commercially available. In the offshore surveying industry, these are now the standard in most projects giving offshore survey vessels a positioning accuracy of a decimetre horizontally and slightly more vertically.

Underwater Positioning with Acoustic Positioning
GNSS does not work underwater. As a result, acoustic techniques were developed starting in the 1930s (Radio Acoustic Ranging). In the 1960s, acoustic positioning techniques as we know them today came into play. Over the years these systems have evolved into the current generation of systems which are much more resilient to noise and have improved measurement accuracies.
Full use of Inertial Navigation Systems in Hydrographic Surveying
Three decades ago, Inertial Navigation was something for submarines or a cruise missile. We were happy with heave compensators for the single-beam. With the introduction of multibeam, the motion sensor became a standard. Over the last decade, we have seen the motion sensor develop in three directions. The first is that since using MEMS techniques they have become much smaller and can now be used for many other applications such as drone positioning. The second is that they have become much more accurate (without decreasing size), now giving routine accuracies of less than 0.1 degrees for roll and pitch.
The last development is the full use of inertial navigation systems in hydrographic surveying, both for underwater positioning as well as for surveying in difficult areas such as under bridges. The deployment of Inertial Navigation into hydrography started with the introduction of GPS and Attitude measuring systems such as the original TSS Pos-MV (now Teledyne) and the Kongsberg Seapath systems. Although these systems had some inertial capacity they were mainly designed for accurate and stable heading computations. Nowadays, we see full Inertial Systems with high-quality inertial motion sensors and aided by GNSS, ADCP or underwater positioning systems.
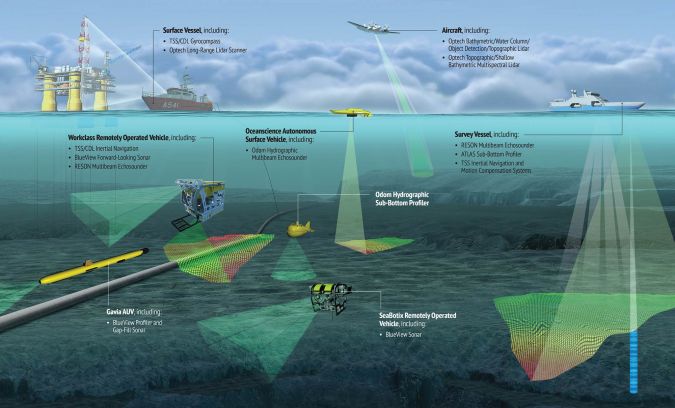
Hydrographic Survey Platforms - ROV, AUV & UAV
For centuries hydrographic surveys were performed from a manned survey vessel; large or small. In the 1960s, the tow fish was introduced, mainly for side-scan sonar. The tow fish was, however, not suitable for inspection around objects such as offshore platforms. Around the 1980s, the hydrographic industry saw the introduction of the Remotely Operated Vehicle (ROV), allowing the sensors to be brought closer to the bottom and, most importantly, allowing control over where they went. As with the tow fish, it was still connected to the mothership but due to its controllable thrusters, it could manoeuvre anywhere its umbilical cable allowed it to go.
Around two decades ago the first Autonomous Underwater Vehicles (AUV) were introduced. Instead of requiring an umbilical cable, the AUV is free swimming and is programmed in advance to follow a certain survey pattern. As a result, the mothership can do other work while the AUV is surveying, or as we see more and more, the mothership can have a ‘swarm’ of AUVs in the water at the same time.
The manned surface vessel, ROV and AUV are joined by the ASV, the Autonomous Surface Vessel and, in coastal areas/inshore, by the Unmanned Aerial Vehicle (UAV). The latter, commonly known as a drone or aerial drone, can now be found in the toy store, but is also used in the dredging industry. The ASV, an unmanned surface vessel, is now beginning its entry into the hydrographic industry.
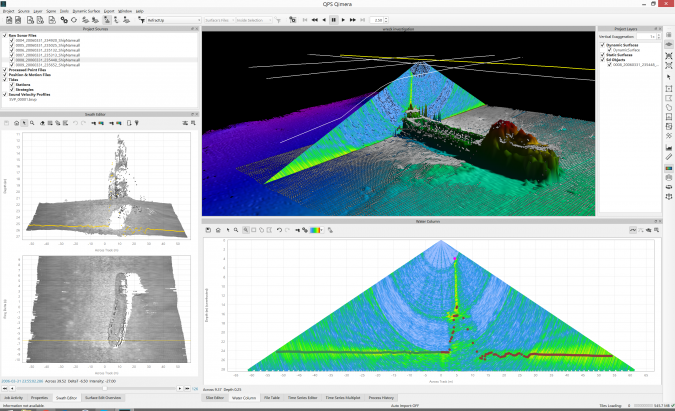
Software for Processing Bathymetric Data
Where processing software and mapping programmes were struggling with the data load of the early multibeams, we now see that processing power has reached a level at which it is no longer the limiting factor in data collection. The amount of data to be processed has, however, increased marking the introduction of more and more automatic data cleaning routines necessary to allow an efficient data collection process for most projects. Water column bathymetry adds even more data and the current generation of software is slowly adapting to these massive amounts of data.
While in the past, the end of any hydrographic project was the generation of a ‘paper’ map (often as a pdf), we now see more and more integral data management where data is stored in databases. These databases allow the distribution and creation of products at will but have also introduced more rigorous information management techniques into hydrographic surveying. The addition of object and attribute data together with the more traditional bathymetric data have spurred the use of Geographic Information Systems (GIS) as part of the hydrographers toolkit for more than the creation of a final chart.
The Future of Hydrographic Surveying
As shown, over the past decade(s) we can see two major trends. One is the ever increasing accuracy of the sensor systems; more data at greater accuracy at higher speeds is something that does not seem to have come to an end yet and we can foresee this development continuing over the next decade or so.
What can also be seen is that technological developments are now catching up with some of the base information. The development of PPP is, for example, showing that the current geoid models are lacking in accuracy and resolution; especially at sea. As a result, the technique cannot be used to its fullest. Over the next decade, we will probably see more and more accurate geoid models being developed. The raw data is already being collected; what awaits is for this data to be made into a model by geodesists.
Similarly, the development of autonomous vessels is just starting. Over the next decade or so we will see further developments making these vessels completely autonomous, allowing them to make on the spot decisions on where to navigate but more importantly where to survey; even in shallow or restricted waters. However, current regulations on the water, as on land, are not yet suitable for this development.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















