KM3NeT Future Deep-sea Research Facility
Building a Cubic Kilometre Neutrino Telescope in the Deep Mediterranean Sea
KM3NeT is a future deep-sea research facility that will be built at depths between 2.5 and 5km in the Mediterranean Sea. The facility will host several hundreds of detection units, which are vertical mechanical structures that suspend very sensitive optical sensor modules. For this design, novel deployment methods were recently tested in the Ionian Sea (Eastern Mediterranean Sea). Eventually, some 10,000 optical modules distributed over about 600 detection units of 700m length and moored 100m apart will constitute a neutrino telescope (NeT) that occupies several cubic kilometres (km3). The array will also be used for unique oceanographic observations.
All matter consists of three point-like elementary particles, the smallest building blocks in nature: quarks and leptons. The most familiar lepton is the electron, another is the neutrino. The speciality of neutrinos is that they are electrically neutral, have very low mass and only weakly interact with matter: they grow very old. As a result, they can probe the deepest universe and, if detected, can provide us with new information that has been created a very long time ago, i.e. billions of years. They are the only particles that can bring information from the core of an astrophysical object. However, they are very hard to detect. Even though about 1 million neutrinos pass a human finger nail unnoticed every second, high-energy neutrino detectors must be massive (1012 kg). One possibility is to construct a large neutrino telescope in the deep sea. This article describes one of the construction’s unusual underwater mooring techniques.
Detection Principle
The Earth can be used as a huge target, whereby a large volume, at least a cubic kilometre, of deep-sea water is instrumented with a three-dimensional array of optical modules (OMs). Such modules consist of very sensitive photomultiplier tubes (PMTs), which are housed in transparent pressure vessels of glass spheres. The PMTs face towards the bottom to (indirectly) detect neutrinos crossing the earth. If a neutrino interacts with matter an electrically charged muon-particle is produced. As the muons move faster in water than the speed of light they produce an optical light-cone, similar to a sonic ‘boom’, in the blue, Cherenkov, light. This light is detectable in transparent media like water and ice. Measuring the arrival time of the light at the optical sensors enables the reconstruction of the path of the muon travelling through the detector. Hence, the path of the neutrino can be reconstructed.
In their glass spheres, PMTs can safely be operated below the maximum penetration depth of sunlight (between 700 and 1000m in the Mediterranean). Even at such depths the detector can be swamped by Cherenkov light from muons produced in cosmic ray interactions in the Earth's atmosphere (1010 per km2 per year) or by bioluminescence: light emitted by deep-sea life like zooplankton and fish. The greater the depth, the smaller the muon background, so that the seawater acts as a shield for neutrinos from above, except for bioluminescence under particular conditions.
A Telescope in the Mediterranean Sea
The Mediterranean Sea appears to be an ideal place for a neutrino telescope: it provides water of excellent optical properties at the right depth close to shore. The huge data transport (~0.5 TB/s) requires an optical fibre read-out cable of less than 100km long.
A neutrino telescope in the Mediterranean Sea will also complement the IceCube neutrino telescope built in the South Pole ice. In the Mediterranean Sea, the larger part of the Galactic disc will be surveyed, including the Galactic Centre, which is barely visible with a neutrino telescope at the South Pole.
How to Build a km3 Underwater Telescope
The construction of a cubic kilometre telescope at great depths demands special mooring techniques. Standard single line oceanographic taut-wire moorings, consisting of an anchor, acoustic release and instrumented cable, all below a sub-surface buoy, cannot be used easily in a construction with, say, 600 detection units (DUs), each 700m high and 100m apart horizontally. Deploying standard moorings with optical sensors in unprotected glass spheres requires extreme precision in handling. Furthermore, the entire telescope needs to be operational within 4 years after the start of production. Thus, it has been proposed to use compacted moorings that unfold upon acoustic command. The new techniques have the advantage that they can be prepared in the laboratory prior to going to sea.
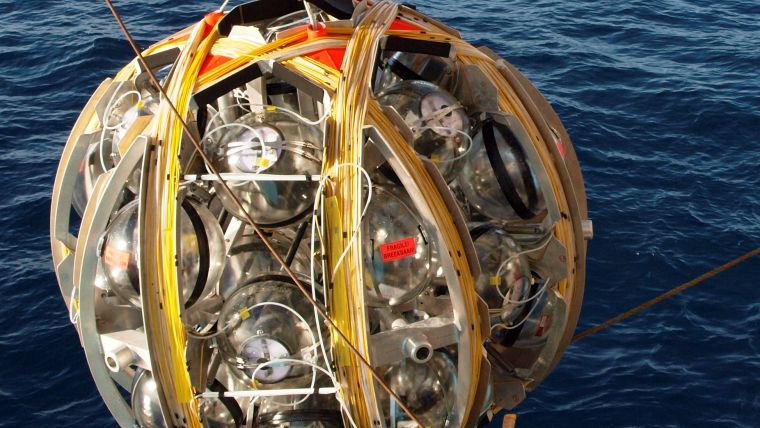
One proposed compacted mooring technique is the ‘String’, with two 4mm diameter Dyneema lines holding 18-20 OMs between them under a 125kg buoy. This low-drag single mooring is wound-up in a re-usable 2m diameter aluminum sphere, the Launcher of Optical Modules (LOM) (Figure 1). The loaded LOM weighs about 1200kg, its anchor 900kg, both in air. Underwater, the whole ensemble weighs about 300kg. It could be mounted on a 1km ground-line, to become deployed as a multiple (~10) string deployment. Here, a single string and its first unrolling are described in some detail.
Compacting a Single String of Glass Spheres
The two 12000N breaking strength Dyneema lines (yellow lines in Figure 1) and the power-supply/data cable (white in Figure 1) are wound on the LOM along three sets of parallel cable trays running around its circumference from pole to pole. The sets are offset by 60°. At the LOMs equator, three horizontal tubes allow for the use of a rotary spooling traction, which can switch between the sets of trays. Twelve empty 17″ glass spheres (some with red stickers in Figure 1) are fixed to the LOM to allow for its surfacing after unrolling the string. The OMs are stored on rings in the space between the sets of cable trays. They are kept in place by springs. The hole at the North Pole is filled with a top-buoy. The loaded LOM fits into a standard sea-container.
On board of the deployment vessel, the lines are connected to the LOM anchor. Cables running through three vertical LOM tubes connect the anchor with an acoustic release op top (between the yellow spheres in Figure 1). After placing the entire structure on the seafloor, unrolling starts as soon as the proper acoustic command is given from the ship (Figure 2). The release beacon will surface freely, followed by the empty LOM. Both are collected from the sea surface (Figure 3) for re-use, whilst the vertical upright string remains in the deep.
Unrolling Test Results
A LOM, loaded with 700m long lines, dummy weights in OM glass spheres, dummy data cable and instrumented with compass and accelerometers, was deployed three times at a testing depth of about 900m near Pylos (Greece). Unrolling took about 9 minutes. Its initial velocity was 1.4m s-1 decreasing to 1m s-1 towards the end of the unrolling. Figure 4a shows the measured compass orientations prior to unrolling, with sensors pointing in all directions. They are shown below each other, but are still in the LOM then. Figure 4b shows the orientations after unrolling; the compasses are now all aligned within intended specifications (<15° deviation from the vertical, for the green arrows). The string is upright as the column of arrows suggests. In the three tests, the unrolling string made about four precession turns over a length of several hundred metres. Due to the tension in the lines, and spreaders every 10m, the string rotated back to a ladder-like position.
Future Tests and Developments
Subsequent string tests will comprise a working optical-electric cable alongside the lines. This will be followed by a long-term deployment of a string with PMT-filled OMs and connection to one of the two existing underwater shore-cable connection units. A final, most ambitious, future test will be a multiple LOM launch. This requires at least one ship equipped with dynamic positioning and a secondary platform or vessel.
Acknowledgements
The author acknowledges NIOZ-technicians T. Hillebrand (now retired), J. van Heerwaarden, R. Bakker, J. Blom, L. Boom, Y. Witte and M. Laan. At Nikhef-Amsterdam I thank coordinator E. de Wolf, at EC LYON (F) L. Gostiaux, at Smit-Engineering-Den Hoorn (NL) A. Smit. This work has been financially supported by the NWO (The Netherlands Organisation for Scientific Research).
More Information
- de Wolf, E. et al. (2013). A launching vehicle for optical modules of a deep-sea neutrino telescope. NIMA, in press, DOI: http://dx.doi.org/10.1016/j.nima.2012.11.146.
- Hillebrand, T., J. van Heerwaarden, M. Laan, R. Bakker, R. Groenewegen and H. van Haren (2011). Autonomous and rapid deployment of a compact taut-wire mooring. Deep-Sea Res. I, 58: 1158-1162.
- Km3net.org
- KM3NeT (2011). Technical design report for a deep-sea research infrastructure in the Mediterranean Sea incorporating a very large volume neutrino telescope, 193 pp.
- van Haren, H. et al. (ANTARES-collaboration) (2011). Acoustic and optical variations during rapid downward motion episodes in the deep north-western Mediterranean Sea. Deep-Sea Res. I, 58: 875-884.
Dr. Hans van Haren is a senior scientist at NIOZ, The Netherlands. His main research field is physical oceanography, specialising in observational studies of ocean currents, internal waves and turbulent mixing. He encourages the development of new instruments, notably high-resolution temperature sensors and mooring-techniques. He is member of the Institutional Board of KM3NeT.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















