Oceans of Earthquakes
Real-time Detection of Seismic Events in the Deep Seas
Globally, the proliferation of sensors and resultant explosion of data is growing at exponential rates. Every digital device and sensor is expected to be available day/night to provide instantaneous results. This is possible if sensors are land or space based. This is not the case for ocean data. Ocean observations, especially far offshore in the remote deep ocean, are sparse due to the high cost, risk and difficulty in the collecting data especially from seafloor sensors. This challenge is one that all industries face in the quest to directly measure and better understand the biological, geophysical and environmental conditions occurring in our ocean.
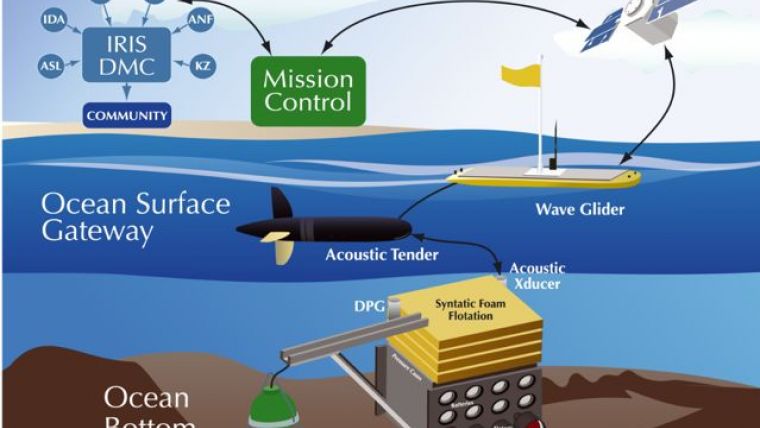
Scientists at Scripps Institution of Oceanography (Scripps) have taken on this challenge by creating an innovative, unmanned observatory that provides real-time seismic telemetry from the seafloor through the water column to space and shore. Partially sponsored by a US National Science Foundation and in collaboration with Liquid Robotics, it’s called the High Seas Telemetered Seismographic Observatory. This system was created to demonstrate the feasibility of placing permanent seafloor seismic observatories, paired with surface communications gateways, to directly measure seismic activity in locations far from continental sites or nearby islands.
To overcome the obstacle of communicating seafloor sensor data to the ocean’s surface through 4,000m of water, Dr. Jon Berger along with his collaborators, Dr. John Orcutt, Gabi Laske and Jeff Babcock, architected a two-part system comprised of the Ocean Bottom Package (OBP) sitting on the ocean floor and the Ocean Surface Gateway (OSG) located on the ocean’s surface. The Ocean Bottom Package measures, records and telemeters sensor data through the water column to a free-floating gateway system holding station above. The Ocean Surface Gateway then buffers and retransmits the data via satellite to shore in near real-time. If communications to the satellite are paused, the sensor data is stored on the OSG until communications are restored.
Unmanned, Long Duration Ocean Monitoring, Towing and Communications
The breakthrough technology that made this system possible is an Unmanned Surface Vehicle (USV) called a Wave Glider, developed by Liquid Robotics. It is comprised of a two-part system with a float on the surface of the ocean connected to a wing rack or Sub, 4 to 8m below. It directly harvests and converts wave energy into forward propulsion while using solar energy to power the computing, communications, navigation and sensor payloads. Powered 100% by renewable energies it can operate autonomously at sea for up to a year collecting and communicating data while producing no emissions.
The Wave Glider hosts a wide variety of sensor payloads both onboard the vehicle and towed from behind. For the Scripps’ mission, the Wave Glider towed an acoustic modem and directional low-frequency transducer, both of which trailed behind in a neutrally buoyant Towed Acoustic Modem (TAM). For properly designed towed payloads, the Wave Glider was able to navigate with the towbody with little observed loss of speed. In addition to towing the TAM, Scripps tested the feasibility of using the Wave Glider for autonomous deployment of the OBP. The concept uses the Wave Glider to tow an appropriately designed OBP to the desired location, release it, and then hold station to provide real-time telemetry. This eliminates the need for costly ship operations and greatly reduces the life-cycle cost of an ocean bottom station.
Mission: Detecting Seismic Earthquakes, even those Previously Undetectable
In September of 2014, Dr. Berger and his team launched the Wave Glider, 30km from Point Loma, CA, to travel west of San Diego approximately 300km. In 4,350m of water, the Wave Glider held station, collected and transmitted telemetry data in near real-time from the bottom seismic sensors to the Iridium satellite. The tests of the surface gateway demonstrated an acoustic efficiency of approximately 396 bits/J. For example, it was able to send 4 channels of compressed, 1 sample per second data from the ocean bottom to the gateway with an average power draw of approximately 0.15W and a latency of less than 3 minutes. As long as the horizontal distance to the seafloor instrument was within an ocean depth, the data return rate was nearly 100%.
During the 68 days at sea, the system detected and recorded seismic earthquakes along with one small earthquake that did not appear in any earthquake catalog nor was it recorded by the nearest land station on San Clemente Island. The magnitude of this event was approximately 2.0. It is very likely that such events remain undetected with the current on-land seismic monitoring network capability in Southern California. Data such as this from previously unobserved oceanic areas are invaluable for both national and international agencies in monitoring and characterising earthquakes, tsunamis and nuclear explosions.
Conclusion
Demonstrating the first, near real-time observations of an earthquake from an autonomous offshore observatory, scientists at Scripps Institution of Oceanography have proven it is possible to overcome the technology challenges to real-time, seafloor to space communications of sensor data. Their tireless efforts to produce an integrated, deep-sea seismic observatory advances early earthquake and tsunami detection and prediction that will contribute to improved disaster preparedness and ultimately a reduction in loss of life and property.
Acknowledgements
The authors wish to thank the scientists at Scripps Institution of Oceanography, Dr. Jon Berger, Dr. Jonathan Orcutt, Gabi Laske and Jeff Babcock, for their leadership and collaboration in developing the High Seas Telemetered Seismographic Observatory. Liquid Robotics is proud to be a technology partner and to play a small role in the advancement of unmanned deep ocean seismic research.
More Information
An ocean bottom seismic observatory with near real-time telemetry, Authors, J. Berger, J. Orcutt, G. Laske, J. Babcock, Scripps Institution of Oceanography, University of California, San Diego, California, USA, First published: 5 February 2016 in AGU Publications, Earth and Space Science.
Ryan Carlon joined Liquid Robotics in 2011 with a decade of experience in robotics and advanced software development for unmanned maritime vehicles, vision-based mapping, localisation and navigation systems. A graduate of Harvard University with an Electrical Engineering degree, Ryan’s focus has been on the advancement of autonomous robots for the maritime, agricultural and defence industries. At Liquid Robotics he leads the North American Science and Research initiatives and works collaboratively with the international science community on solutions to address the global issues facing our oceans: illegal fishing, climate change, ocean preservation, severe weather prediction and early seismic detection/warning.
Email: [email protected].
Joanne Masters is president of Masters and Masters, a full service marketing and communications consulting firm. With decades of experience in high technology sales and marketing to the Defence, Science and Commercial markets, Joanne specialises in helping clients in aspects of Marketing; from strategic planning to branding & messaging through PR/corporate communications and field programmes. She has worked in leadership roles at Cray Research and Sun Microsystems, where she led the global High Performance Computing (HPC) sales, marketing and technical engineering organisation for worldwide government and technical markets. She was the founding business leader for first Cyber Security Program Office at Sun Microsystems.
Email: [email protected].

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















