Sharing the Wealth
Towards an Ocean Sensing Network
Autonomous Underwater Vehicles (AUVs) and associated undersea technologies have demonstrated exceptional current utility and great growth potential for military, governmental and commercial maritime agencies as well as for ocean research institutions. While sustained and aggressive research, development, testing and evaluation is still in order, the technology is available now to benefit potential consumers with the incredible range of data these systems can already provide. Although unmanned systems in other domains (air, ground, and space) have experienced rapid growth resulting from wartime necessities, there remains a prevalent ‘wait and see’ mindset about unmanned undersea systems among those who work in and depend on the oceans. The drive for ‘bigger, better, faster, cheaper’ systems is understandable, but AUV manufacturing and operational expertise are niche commodities that require constant and consistent cultivation to maintain. Rather than continuing to impose the cost of development on government and military organisations, as is the traditional practice, or of imposing the cost of ownership on agencies that cannot afford the initial expense, existing systems can be employed across the world today to offset those costs by the creation of a pay-for-access network to share the wealth of data that is already available.
Evolving global realities prove that there is a real and present demand for information about the ocean environment to allow response to changing economic and climatic conditions and to provide security for ports, harbours and shipping lanes in a world that is increasingly dependent on the uninterrupted flow of maritime commerce. Myriad unmanned systems deployed worldwide and connected via an overarching data network can provide persistent presence and access to information for a wide audience of users. There is a possible practical and cost-effective approach to creating such a network. There is no intent, however, in this short discussion to address treaty obligations such as those that might be imposed by UNCLOS III or legal and insurance issues, which must eventually be addressed.
As background, AUVs offer significant advantages in comparison to manned or towed systems. Due to their inherent stability of flight and ability to maintain precise altitude above the sea bottom, AUVs are better able to provide higher quality imagery. Their stability of flight also contributes to the high degree of accuracy that can be achieved in AUV navigation, which in turn enables the repeatability of surveys; the AUV is quite adept at returning to previous survey waypoints and at re-creating previous tracks. AUVs consistently demonstrate a higher coverage rate and attendant shorter survey time.
Obviously, there are significant manpower and resource savings to be realised immediately. There is no need to constantly monitor the AUV during its mission, and the host vessel does not need to ‘mow the grass’ and thereby waste fuel and human capital any longer. Rather, the expense of maintaining a ship and crew on station, in unco-operative weather, is largely avoidable. This means a direct reduction in the cost of operation and in exposure to the exigencies of unfriendly sea conditions. Further, for port security and inland survey purposes, there is no need to close busy waterways (with the immense expense that this could entail) to perform missions.
Perhaps most importantly, AUVs offer tremendous flexibility in payload options, and these often might be interchangeable, even while at sea. Most vehicles also offer the capability to employ more than a single sensor for a single mission.
Barriers
With all of these advantages, one might think that an AUV is an easy choice for interested clients. The reality is that there are still ponderous barriers to their more widespread acceptance and use. First, and perhaps most daunting, is the initial cost of investment for the purchase of an AUV. The adage that, ‘you get what you pay for,’ is abundantly true in the AUV manufacturing field. If you wish to have a highly capable system that reliably returns after its missions in the most challenging environment in the world, then you can expect to pay a premium for that. If you wish to explore the deepest ocean depths and return with superb quality data and imagery, then you want an equally superbly engineered system to do that for you.
The fear of losing an expensive asset is certainly comprehensible, and this issue must be addressed at every level before AUVs will be used to maximum advantage. Oddly enough, military crews have shown the most reluctance to fully employ AUVs, while academic institutions have logged more miles than anyone else to date. I will leave it to the audience to deduce the source of that phenomenon, but AUVs work best when you use them often. Frequent use, of course, breeds familiarity and confidence. Those who use the vehicles most will be the first to discover new ways of using them.
Yet, the requirement for undersea data is increasing and shows little sign of abating as the promise of access to previously inaccessible oceanic resources and the criticality of maintaining secure and open sea lanes and ports is realised globally. There is already a prodigious amount of data that has been collected and severely under-used that could be made available to wider audiences who cannot afford the investment in expensive equipment. Access to this data could be made available on a pay-for-use basis, and the proceeds from that use could offset the expense of developing, manufacturing, and operating vehicle systems.
Enablers
While the barriers to use are considerable, there are enablers for more insatiable consumption of AUV- provided data. Consumers really have little regard from which platform the data is obtained. Rather they are focused on three things that one might call ‘freshness, ripeness, and taste,’ similar to a shopper selecting produce. The data must be obtained in a timely manner (not necessarily ‘new’ data), it must be ready for consumption (accessible via common information nodes), and it must be of high quality. Older data can prove very satisfactory, especially in discovering trends (change detection, migratory habits, reef generation or degeneration, and much more). Those with proper resources and funding can ensure that the AUV industry continues to flourish, while receiving compensation for their investment through the sale of valuable data. As more vehicles are built to accommodate the demand for data, the unit prices of these systems will surely decrease.
Vision and Implementation
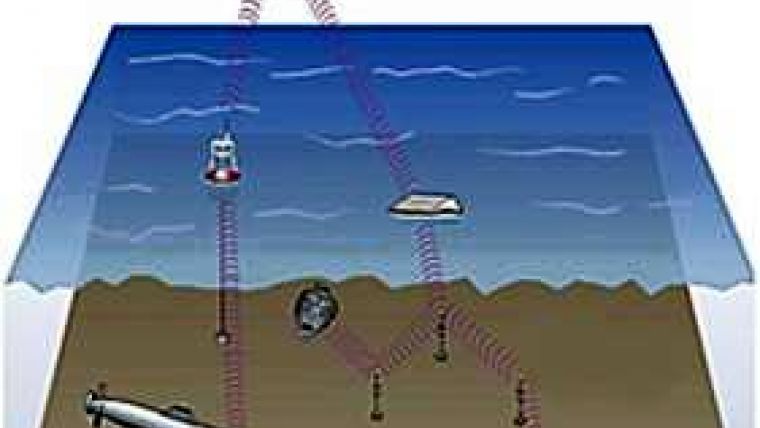
The vision for an ocean sensing network (Figure 1, top) is: ‘An undersea communications network with all the features of the Internet for underwater communications, data collection, military use, commercial use and individual users.’ This vision is certainly more inclusive in terms of access than some other current concepts for undersea observatories that have been proposed. It is undeniably ambitious in its scope, but as you will see, quite practical in implementation.
The UNDERNET will employ autonomous surface nodes designed to harvest wind, wave, and solar energy for endurance and persistence. The data collectors will consist of a network of undersea and surface vehicles and deployed sensors that glean positioning information and mission updates from known surface nodes and that can continue on mission without frequent surfacing. They can also download data to those nodes for dissemination.
The surface nodes are networked by satellite and have constant GPS connectivity, so that each surface node has immediate positional and near real-time situational awareness. They can be commanded to reposition from either an earth satellite or an unmanned surface or subsurface platform. Thus, the network could be redeployed as requirements dictate or evolve. The nodes would be designed to submerge as a safety measure to avoid potentially damaging weather and seas.
The UNDERNET business model is akin to that used for Commercial Satellites, although a bit more accessible, tailorable, and reasonably priced. The whole system accounts for means to:
- allocate resources to collect data
- communicate with platforms collecting that data
- assemble, process, evaluate, disseminate and display data and
- control levels of access
The physical composition of the system includes:
- ‘Sea Satellites’ or surface nodes (Figure 2)
- Unmanned Maritime Systems (AUVs and USVs)
- Undersea Docking Stations (Figure 3)
- Deployed sensors
The virtual components would include:
- Network
- Interfaces and
- Functionality
Sea Satellite Concept
One particular concept for the actual surface node is the MIT Sea-Grant Autonomous Surface Vehicle (ASV) design that comprises a composite vertical fin having a bottom-mounted bulb ballast, a surface body fitted with two solid-wing-design folding sails that double as solar panels, a GPS and satellite-communications antenna, and a water-propulsion system comprising a motor-driven propeller and two actuator-positioned rudders. When outfitted with a full complement of batteries, the vehicle is about 8ft tall and weighs about 100lbs.
According to preliminary estimates, the ASV can maintain its position in moderate seas within 250m of a fixed location while using, on average, 1.5 Watts of energy. Energy harvested from solar panels and wind is stored in batteries to provide energy for communications and for other on-board systems.
The UNDERNET concept directly addresses the cost of ownership of currently expensive unmanned maritime systems. Through a fee-for-service arrangement, it is conceivable that the investment made by vehicle manufacturers and survey service providers could be recovered within the first year of operation. Those fees could include direct lease of the nodes, vehicles, and sensors, or simply access to data archived on the network. Direct lessees would enjoy the added benefit of being able to task the platforms and sensors to conduct surveys. Persons requiring certain data could post their requirements on the site, and equipment owners/operators could offer their services via private bid. It stands to reason that if the response is strong, additional systems will be manufactured and additional service providers will enter the market.
Although there are quite a few obvious applications that could benefit from the creation of UNDERNET, the ‘Killer Applications’ are predicted to be Port and Harbour Security, Oil and Gas survey and pipeline inspection, and Anti-Submarine Warfare (ASW) / Anti-Surface Warfare (ASUW) operations.
The great promise of an Ocean Network lies in its accessibility to a wide audience. The physical equipment used in the system is important, but the technology readiness level of that equipment is quite well-established with few exceptions. Rather, it is the organisation of the network and its administration that will provide the challenges; maintaining connectivity, allowing scalable levels of access, enabling tailoring and tasking of data requirements, and creating a standing, expandable database will generate immediate value and will add new users on an unprecedented scale.
Acknowledgements
This article wade made possible through the work performed under a Cooperative Research and Development Agreement (CRADA) between Battelle Memorial Institute and the Naval Undersea Warfare Center (NUWC) in Newport, Rhode Island to jointly address an undersea communications system with independent power and broad coverage with the following contributors in these roles:
- NUWC Newport RI (End to End Communications, Large Networked Undersea Systems)
- Battelle Memorial Institute (System Integrator, Hardware Development, Hardware Builder, System Operator). Dr. Lynn Faulkner, Ph.D. Battelle Program Manager
- Bluefin Robotics Corporation (Technical Support, Operations, Proof of Concept, and Manufacturing)
- Massachusetts Institute of Technology (Naval Architect)
- University of Michigan (Efficient Propeller Supplier).

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















