
Sub-bottom object detection
An update on the main innovations of the past years
While nautical charting mainly focuses on bathymetry and objects that form a hazard to shipping, offshore construction and dredging require sub-bottom information. There is nothing worse in any project than finding wrecks or unexploded ordnance (UXO) after construction has started. The detection of covered cables and pipelines is also an important survey objective. There have been some interesting innovations in this field over the past years and, while this article does not attempt to be exhaustive, it provides an overview of the various types of system available.
The sub-bottom profiler
The classic instrument for detecting bottom layers and sub-bottom objects is the sub-bottom profiler (SBP), or shallow seismic system. We distinguish the pinger, boomer and sparker type instrument, based on their acoustic source.
The pinger (e.g. General Acoustics, Tritech) is effectively a very low frequency echosounder that offers good resolution at the cost of less penetration. Modern versions use CHIRP (Compressed High Intensity Radar Pulse) signals, which offer an extended range and even higher resolution. This type of SBP is often used to detect relatively shallow objects, for example in the form of a pipetracker for pipeline and cable detection. The CHIRP pinger SBP is sometimes combined with a side-scan sonar (SSS) in a single tow fish, allowing surface and sub-bottom data to be collected simultaneously (see separate article for SSS). A very special form of pinger type SBP is the parametric echosounder (e.g. Innomar, Kongsberg). This instrument combines the bottom detection accuracy of a single beam echosounder at high frequency with the penetration of a low-frequency pinger SBP. The main downside is that the amount of low frequency energy is generally less than in a traditional pinger or CHIRP SBP.
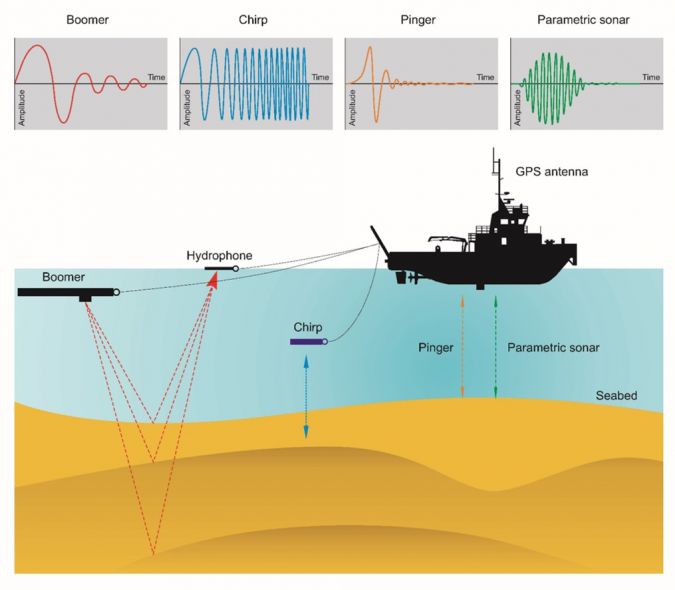
If greater penetration is required, the boomer (moving plate generates the sound) or sparker (a series of electrodes generate sound) are the go-to systems. These systems (e.g. Geoforce) have a separate sound source and a number of hydrophone receivers in a streamer. They are therefore also called shallow seismic systems, as they operate in a similar manner to their deep seismic family members. The main disadvantage of these systems, besides having to be towed, is their reduced resolution, which makes them less suitable for detecting small objects. Of the two systems, the sparker has the greatest penetration. However, the high voltages involved means that more safety precautions are required.
The main disadvantage of all SBPs is that they can only find objects up to a certain perpendicular distance (depending on the angles of the transducers) from the survey line. Also, due to the use of sound, they can only discriminate objects that have a different acoustic impedance. In practice, this can mean that a wooden wreck may not be found as its acoustic signature can be very similar to the surrounding bottom. Also, the relatively large beam angles mean that small objects may not be easily detected, especially with the boomer and sparker systems.
Sub-bottom swathe profiler
A relatively new system is the sub-bottom swathe profiler (e.g. PanGeo, Stema), which operates in a similar way to a multibeam echosounder. There are different types available, with the simplest being a single transmitting pinger source with multiple hydrophones that receive the data in a swath, giving a multi-channel SBP. Its operation is similar to that of a regular pinger SBP.
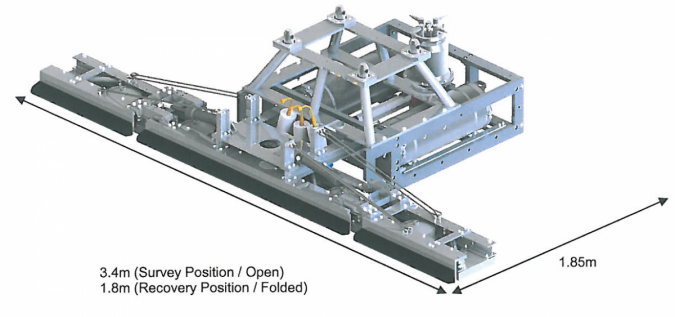
A more complex instrument is the beam-forming Sub-Bottom Imager (SBI). This instrument has a number of CHIRP type transmitters similar to those found in a ‘regular’ SBP. The transmitted signal is received by an array of receivers, allowing for a beam-formed, synthetic aperture SBP and giving the user a swath of sub-bottom information rather than a single line of information. With this set-up, a swath of around five metres can be surveyed on one track with a penetration of up to seven metres. The instrument is however quite large and requires a work class ROV or similar vehicle, such as a large ROTV. As with the SBP, the SBI also relies on differences in acoustic impedance and can thus not easily discriminate between various types of objects or objects that resemble the surrounding material. However, due to its swath-like measurement it is capable of picking up much smaller objects.
Magnetometer
Where the detection of ferrous objects is required, such as in wreck or UXO detection, the magnetometer can be a useful instrument (e.g. Geometrics). The downside is however that the standard magnetometer can only indicate the presence and relative field strength of an object that is magnetized. No detailed information is obtained on size or depth of the object. The other downside is that small objects require the magnetometer to be very close to the object (and thus close to the bottom). To measure small objects, multiple magnetometers are often towed behind an ROTV.
If information about the location and depth of an object is required, a gradiometer can be used. This instrument consists of multiple magnetometers mounted at a fixed distance. Using the differences in field strength between the various magnetometers, the direction and depth can be found. It does however have the same limitation as the magnetometer regarding the detection of small objects.
When looking for wrecks and UXO, the main disadvantage of the magnetometer is that it can only detect ferrous objects. This means that a wooden wreck with brass fittings will go undetected (brass is non-magnetic), as will aluminium mines such as the WWII German LMA or LMB or brass artillery shells.

Electromagnetic systems
While the magnetometer detects ferrous objects using a passive detection method, electromagnetic systems use active detection. They operate in a mode similar to a ‘metal detector’ in that they send out an electromagnetic pulse into the bottom. This pulse then magnetizes metal objects (including non-ferrous objects), after which the return signal is picked up by the instrument.
An example of this type of instrument is the pipetracker (e.g. Teledyne TSS), which is used to follow pipelines under the bottom. This type of instrument is usually mounted on an ROV and brought very close to the bottom to make detection easier. The instrument can also be useful in the detection of UXO, but its mounting on an ROV together with a relatively small detection width makes for a time-intensive survey method. Combined with a limited detection range, this technique is more suitable for pipeline detection than for wreck and UXO searches.
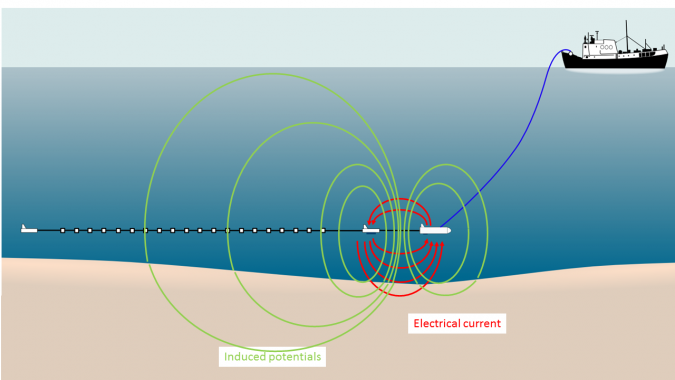
Another type of electromagnetic imaging system (e.g. Mappem) operates in a similar way as the shallow seismic system. However, rather than using sound, it uses electromagnetic energy for detection. The signals are sent out from a single transmitter and then received by a number of receivers on a streamer that is towed near the bottom. The streamer is kept at depth using controllers at the start and end of the streamer. The transmitted current is picked up by the array and gives a relatively high resolution, but also an indication of the types of material the current has passed through.
Ground-penetrating radar
Ground-penetrating radar (GPR, e.g. IDS GeoRadar, ImpulseRadar) is often used on land for detecting objects. It is essentially an electromagnetic system, but rather than using magnetism for detection it uses radio waves as in a regular radar system. The system is used in fresh water on certain projects but is unable to work in salt water due to the high conductivity of salt water, which disperses the radio waves.
Conclusion
This article describes a number of different sub-bottom measurement techniques. As is shown, there is no ideal system available today, and each of the systems described has its drawbacks. The magnetometer, for example, cannot detect non-ferrous objects, and the SBP and its derivates cannot distinguish objects with similar acoustic impedance. For the positive detection of an object, a number of techniques are often used in conjunction: to detect wrecks, the SBP and magnetometer / gradiometer offer good perspectives, unless the wreck is mainly made of wood and is waterlogged. For the positive detection of UXO of all types and shapes, the SBI together with a towed array of magnetometers or an electromagnetic array offers a potential solution but at a cost. For pipelines and cables, the pipetracker and/or the SBP can be used to detect the amount of coverage. For small pipelines and cables, the SBI may be a better option for correct detection with greater burial depths at a cost.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















