Bio-inspired Underwater Robotics
Swimming, Swarming and Sensing
For operations in complex underwater environments, bio-inspired robots offer manoeuvrability, stealth and autonomy. They integrate propulsion and control systems into one multi-purpose undulatory propeller. By generating large counteracting forces, undulating fins generate a wide range of net torques and accelerations. Bio-inspired designs can provide stealth by imitating the motion patterns of organisms. Bio-inspiration provides strategies to integrate multimodal sensory information, and algorithms on how to form robot swarms. Multimodal sensing and swarming facilitate navigation during indeterminate tasks, such as surveying or maintenance, provide robot redundancy, and increase the temporal and spatial resolution of a mission.
People have been inspired by nature since the dawn of engineering. Early designs lacked the technology both to build good bio-inspired designs and to learn the physics underlying animal motion. Instead, they copied nature in the hope of reproducing nature’s performance. A famous example of a biomimetic designer is Otto Lilienthal, whose gliders were based on the wings of white storks – yet lack of understanding the underlying physics proved fatal for design and designer. Over the last 100 years, we have made huge technological progress, helping us not only to understand the physics of how animals move, but also providing us with the technology to move beyond bio-mimetic designs, which simply imitate nature. In contrast, bio-inspired designs use physical discoveries made by studying biology. Yet the progress in science and engineering has also shown us that bio-inspired design has its limitations. For example, flapping wings are not superior to rotating wings when speed and energy efficiency are top priorities, but bio-inspired robots are more suitable than conventional designs when manoeuvrability, stealth and autonomy are required.
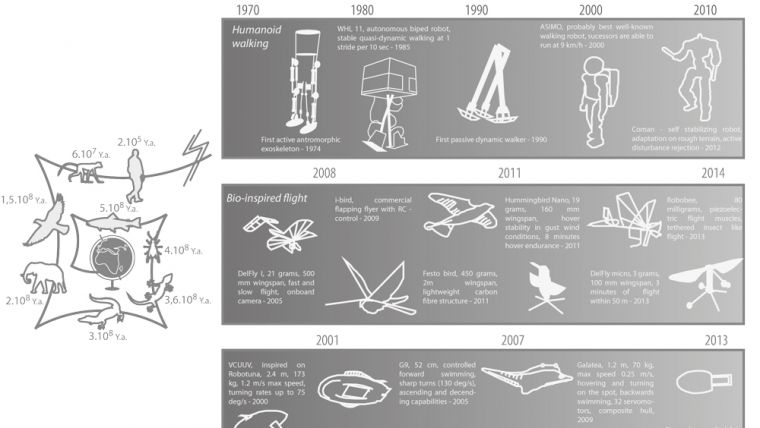
Nature has inspired locomotory science and engineering for centuries, yet progress has not been uniform across the three main locomotory modes – walking, flying and swimming, Fig. 1. Walking is the most intuitive locomotory mode in terms of propulsion mechanics, sensory control and stability; consequently, scientific progress has been swift. While the first walking robots had complex actuated joints, making them slow, energy-inefficient and not particularly stable, locomotion scientists were quick to point out that animals swing their legs largely passively. This insight led to the design of passive dynamic walkers, whose legs swing like a pendulum. This type of passive-swing walking made walking robots not only more efficient but also faster and more stable, able to walk in rough terrain.
Human intuition is less helpful when developing bio-inspired flying and swimming robots. Here, advances rely more heavily on progress in fundamental and applied scientific research. Experimental and computational flow visualisation, combined with high-speed videography, has helped scientists to identify novel lift-generating mechanisms in insects, the smallest active flapping flyers. These insights have led to flapping micro-air vehicles, Fig. 1. The wing and flow dynamics during flapping flight not only provide lift and thrust but also passive control and stability. Studies on knifefish locomotion by Cowan and MacIver, and our own studies on seahorses and cuttlefish, have revealed a similar degree of integration in swimmers. Yet this integration to achieve both manoeuvrability and stability comes at the cost of lower efficiency. While walking and flying robots already integrate propulsion and control to achieve both manoeuvrability and stability, this design strategy has not yet been applied in commercialsed, bio-inspired swimming robots.
Bio-inspired robots have also greatly benefitted from technological advances brought on by commercialisation. Piezo-electric motors, smart materials and shape memory alloys allow engineers to mimic musculoskeletal structures. Flying robots depend on extra-light materials to reduce weight and on energy-dense batteries to carry their power on board. Artificial muscles have comparable or higher power and work densities than electrical motors and even real muscle. While mobile devices have driven battery technology, and nanotechnology is helping to develop power-dense motors, we still lack flexible materials that are also durable in corrosive, high-fatigue, high-stress environments. Many bio-inspired designs require highly flexible yet robust materials to allow large-scale deformations for wing morphing and undulatory fin swimming. With the advent of 3D printing, the miniaturisation of mechanical and electronic parts, and new composites, we will soon be able to scale down current oversized bio-inspired designs and mimic tissue-specific properties to mass-produce cost-effective robots that can operate in deep-sea environments.
Underwater Propulsion
Underwater exploration is particularly challenging because oceans are not only chemically and physically harsh, but many missions take place in cluttered and unpredictable environments. Bio-inspired robots might be adept at navigating sites such as estuaries, oil rigs and harbours, Figure 2.
A high priority during monitoring and rescue tasks at vulnerable and unstable sites is to minimise physical disturbance. Examples are archaeological sites, coral reefs and catastrophes. For low-mechanical-impact tasks, undulatory fins are more suitable than rotating propellers – they do not get ensnared by cables or kelp. Their slow, undulating movements can generate high hydrodynamic forces and torques without fast-rotating blades and without a strong, swirling hydrodynamic wake. For high-agility tasks, multiple fins can generate counter-acting forces and torques for both high stability and manoeuvrability. Fins are highly tuneable: they can modulate hydrodynamic force and torque by modulating wave speed, direction, amplitude and frequency. This redundancy allows such undulatory propellers to adapt their control strategy to constraints imposed by their tasks or environment.
Bio-inspired designs also minimise visual disturbance. Surveillance tasks often require blending to avoid detection. Robots with undulatory fins gain stealth by imitating the motion patterns and centre-of-mass dynamics of aquatic organisms.
Seahorses are an example of a highly manoeuvrable, yet low-disturbance design. Their integrated propulsive system comprises three undulatory fins and a swim bladder to perform hovering, on-the-spot turning, slow swimming, and fast pitch and yaw acceleration. Small changes in the relative contributions of their multiple fins allow seahorses to accelerate and pivot quickly in any direction.
Another inspiration is cuttlefish, which have two undulatory fins and one siphon that acts as a thrust-vectored jet. Fast changes in undulation frequency and amplitude, reversal of wave direction, and counter-propagating waves enable cuttlefish to execute on-the-spot, tilted, 360° yaw turns, and to swim backwards into a hole. Cuttlefish can climb almost vertically, head down or up, using their fins plus siphon to gain extra vectored propulsive power.
Knifefish are an example of a single-fin design. Their fin carries counter-propagating waves, allowing knifefish to execute precision manoeuvres while hunting prey that is hiding in the sand. Studying the hydrodynamics of these fins revealed that horizontal counter-propagating waves generate both horizontal and vertical forces, allowing the knifefish to translate and rotate quickly in all directions. Current underwater robots do not yet use counter-propagating waves, Fig. 3, but this strategy will greatly enhance the already considerable manoeuvrability of undulatory-fin robots.
Underwater Sensing
Surveillance requires robots to navigate through changing and unpredictable environments without getting lost. Distributed sensing – multiple robots sharing information in a swarm – is particularly suited for indeterminate and dynamic tasks, such as prospecting and tracing plumes, when the robots must find their way without the benefit of maps.
Fish schools are an example of collective intelligence through distributed sensing. Golden Shiners school in shallow water and seek out patches of shade in which to hide. With increasing school size, the time that each fish gets to spend in the shade increases dramatically. This collective intelligence emerges when the individual fish implement two simple rules: ‘when I am in the shade, I slow down’ and ‘I follow my conspecifics’. The same studies also show that individual fish do not respond to gradients, yet the entire school does track light gradients effectively. Only rudimentary cognition is required to track and find a patch of shade when fish operate in schools.
An analogous engineering application is the tracking of underwater plumes, either for prospecting or to identify sources of pollution. Here again, mapping of gradients is difficult and even counter-productive because turbulence often mixes and breaks up plumes. Current engineering implementations, developed for example by Wei Li in California, are nominally bio-inspired by the way in which individual moths track pheromone trails in air. The recognised advantages of distributed sensing by a source-tracing swarm are yet to be implemented in robots. Control algorithms are already being tested in computer simulations.
Bio-informed design
Neither mimicry nor inspiration is a sound engineering strategy. Undulatory propulsion and distributed sensing show that fundamental biological physics can inform engineering in a systematic way, leading to unexpected new mechanisms and algorithms. An exciting frontier is the ability of simple organisms to function in noisy environments with an apparent dearth of sensory information and processing power. Current thinking in biology and robotics stresses that limited resources are best used to integrate multiple low-resolution modes of perception, and thus dispense with the need for high-resolution sensors and mental maps. Such insights are already reflected in the multi-modal control strategies developed by Campolo and his collaborators for a robotic fly. The design of swimming robots is currently focused on propulsion systems controlled by functionally separate sensors, Fig. 3. Meanwhile, biologists at the University of Chicago have shown that fish in fact integrate sensing and propulsion in their fins, which will probably be the future of bio-informed mechanical swimmers.
More Information
- http://www.scholarpedia.org/article/Biologically_inspired_robotics
- Hedrick, T.L., Cheng, B., Deng, X., (2009). Wingbeat time and the scaling of passive rotational damping in flapping flight. Science, 324, 252-255.
- Sefati, S., Neveln, I.D., Roth, E., Mitchell, T.R.T., Snyder, J.B., MacIver, M.A., Fortune, E.S. and Cowan, N.J., (2013). Mutually opposing forces during locomotion can eliminate the tradeoff between maneuverability and stability. Proceedings of the National Academy of Sciences of the United States of America, 110, 18798-18803.
- Madden, J.D., (2007). Mobile robots: motor challenges and materials solutions. Science, 318, 1094-1097.
- Berdahl, A., Torney, C.J., Ioannou, C.C., Faria, J.J., Couzin, I.D., (2013). Emergent sensing of complex environments by mobile animal groups. Science, 339, 574-576.
Sebastian Henrion graduated in 2010 from the Faculty of Aerospace Engineering, Delft University of Technology. He currently works at the Experimental Zoology chair group of Wageningen University, pursuing a PhD in the biomechanics of swimming.
Tim Vercruyssen received a degree in electro-mechanical engineering from KaHo Sint Lieven, Belgium, in 2006 and graduated from Aerospace Engineering, Delft University of Technology, the Netherlands, in 2010. He is currently working towards a PhD degree at the Delft Biorobotics Lab of the Delft University of Technology.
Ulrike Müller is an associate professor in Biology at California State University, Fresno, USA. She has a PhD in Marine Biology from Groningen University, the Netherlands, and her research focuses on bio fluid dynamics of swimming and feeding in fish and other organisms.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















