Underwater Communications and the Level of Autonomy of AUVs
A Tale of Two Technologies
Autonomous underwater vehicles (AUVs) are a recurrent theme in maritime and offshore applications, and in particular those involving long and costly data-gathering operations such as hydrographic surveys. Challenging surveys like those required for search operations following an aircraft crash in the oceans and for mapping oil spills below the ice during Arctic operations demonstrate the need for flexible solutions that enable mapping in deep, remote and congested locations. AUVs provide flexibility by cutting the umbilical cord to the mother vessel. This implies the necessity for underwater communications and a high level of autonomy for the vehicle as well as interoperability between communication devices. This article aims to give a general introduction on this subject.
Remotely Operated Vehicles (ROVs) and towed vehicles are commonly used for hydrographic surveys to provide real-time collection of data to be stored and analysed on the ship. ROVs are linked to the vessel by a neutrally buoyant umbilical cable that provides power and a high-rate data link to the operator. ROVs have limited autonomy, being an extension of the sensor and actuator capabilities of the operator who sends commands and makes manoeuvers through the data link. These systems can only be used at a limited standoff distance and require the presence of the vessel in the operational area. Also, operations in deep water with towed vehicles can be cumbersome because of the kilometre-long cables: the system used for the search for flight MH370 in the Southern Indian Ocean required an 8,000m long cable.
AUVs extend and complement the capabilities of ROVs: they allow better manoeuvrability than tethered solutions and can be operated at larger standoff distance. AUVs operate below acoustic shadow zones as well as below ice and in deep water. At the same time, they can carry high-resolution sensors such as side-scan and synthetic aperture sonar and autonomously optimise their distance from the seafloor.
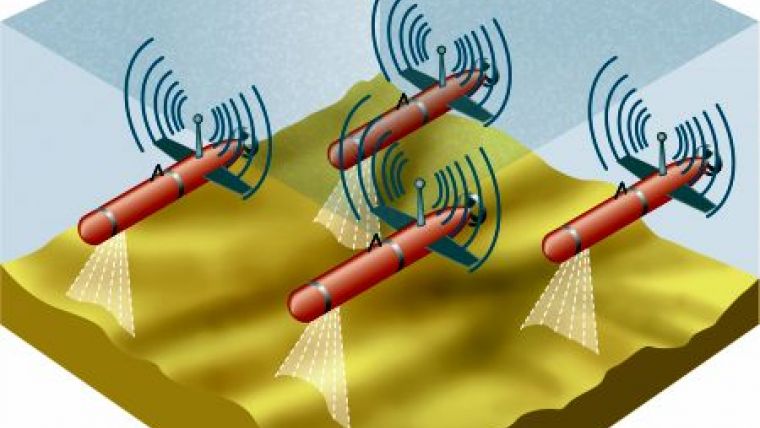
Furthermore, multiple AUVs can be used in parallel, for example in a ‘swarm’ concept, to conduct more efficient and effective operations (Figure 1). Applicability for such use is currently being investigated in a number of EU projects.
Underwater Communications Necessity
The use of AUVs has as a direct implication on the necessity for underwater communications. Communications between AUV and control station are necessary to enable the operator to monitor the progress of the survey and the status of the vehicle. Also, in future operational concepts that involve the use of multiple vehicles for surveying of pipelines or monitoring of underwater infrastructures, communications between vehicles will be crucial. The swarm concept in itself is based on the existence of local communications between vehicles, to be able to exchange relevant information between vehicles and produce emergent behaviours.
How to Communicate Underwater
Communications work in a very different way underwater than above water. On the surface, WLAN and radio communications ensure the exchange of large amounts of information between vessels and the shore, with small delays and losses. These technologies cannot be used underwater because they are based on electromagnetic waves that do not propagate as efficiently in the water as in the air. This is due to the intrinsic material properties of water, especially sea water, which has much higher electrical conductivity than air and causes the electromagnetic waves to be strongly attenuated. As a reference, a signal in a typical WiFi band (2.4GHz) would be completely absorbed after a few centimetres in sea water, typically 10cm in sea water with salinity 4S/m.
Acoustic waves, on the other hand, propagate efficiently underwater. An acoustic wave originates by the mechanical compression and dilation of the surrounding material, and its propagation is more efficient when the material is more resistant to the compression. When an incompressible material is subject to a compressional wave, its molecules immediately transfer the extra energy to their neighbours, effectively propagating the compression waves. Therefore, as water is much less compressible than air, sound propagates significantly faster and further underwater, at a speed of about 1,500m/s compared to about 340m/s in air.
Acoustic modems use this principle to send and receive signals underwater. Underwater modems include electro-acoustic transducers to receive and transmit sound signals in the water by converting electrical energy into acoustic energy (transmitting transducers) and/or acoustic energy into electrical energy (hydrophones). In the most common transducers, the conversion of energy is achieved by exploiting properties of special materials (piezoelectric, magnetostrictive or electrodynamic properties) that become electrically charged when subject to pressure and conversely produce a mechanic strain when triggered with an electromagnetic signal.
Challenges
Underwater communication is challenging, partly due to the nature of the signal and partly to the harshness of the underwater environment. The speed of sound in water is about 200,000 times slower than the speed of light in air and this makes the underwater communication link subject to large propagation delays and relatively large motion-induced Doppler effects.
Multipath interference is a common problem in underwater acoustic communications, especially in shallow water environments. This is when the signal reaches the receiver end of the acoustic modem via a number of different paths, due to reflections with the seafloor and the water surface. This creates ‘ghost images’ of the original signal that create frequency-selective interference and degrade the quality of the transmission.
Connectivity dropouts are also a common problem due to the existence of shadow zones in acoustic channels, which are due to variations in the sound speed profile or the creation of bubble clouds in the surface region.
Furthermore, the bandwidth available in underwater communications is severely limited by the transmission loss that increases with the frequency of the signal. This poses serious limits to the amount of information that can be transmitted through the acoustic link. In particular, long range communications systems that can operate over tens of kilometres have an effective bandwidth of only a few kilohertz. Typical data rates for such distances are a few hundred bits per second.
Level of Autonomy
Data collected by AUVs are stored in their internal memory and will not be available to the operator until retrieval of the vehicle, because real-time transmission from distances larger than about 100m requires a large bandwidth that is not available with current underwater communication technologies. The available bandwidth (<20kHz) allows communication of status information, positioning and environmental sensor data, and interpreted sonar data (e.g. detections) but not sonar imaging data (e.g. seafloor maps) in real-time.
Even if sufficient bandwidth were available, delays in the communication make it unfeasible to tele-operate an AUV, in a similar way as it is impossible to tele-operate a Mars rover. Opponents of autonomy use this argument to justify the lack of adaptivity in AUV operations.
A different way to look at this is that the restriction on information that can be transferred to the operator during the mission places a requirement on the level of autonomy of AUV systems (see Figure 2). To enable adaptivity during the mission, autonomous underwater systems should to be able to interpret sensor data (e.g. autonomous mapping, detection and classification) and to take decisions accordingly, eventually having a human as a supervisor with veto power. In other words, an AUV needs to have a high level of autonomy.
Interoperability
Underwater communications are an enabler for cooperative autonomy with multiple underwater vehicles. Future civil and military hydrographic applications wish to include tasks performed by swarms of robots cooperating to achieve a common goal. A proof of this is the increasing number of European proposals accepted on the subject (e.g. FP7 SUNRISE, EDA NECSAVE and ECSEL SWARMS). A swarm must be able to exchange relevant information between vehicles to produce emergent behaviour. The challenge is to enable interoperability between off-the-shelf platforms. Most of the currently available off-the-shelf solutions have closed communication stacks which means that modems of different vendors cannot communicate (easily) with each other. A solution is to offer the user a programmable, software-defined modem that can use different frequencies, modulation schemes and network protocols according to the needed degree of interoperability.
Smart Solutions
The challenges presented by the underwater environment for communications and their link to the required level of autonomy and need for interoperability between communication devices requires smart solutions for making autonomy an effective player in the future of underwater operations. Research technology organisations such as TNO are coupling their experience in autonomy and underwater technology to develop and test applied solutions to these challenges. Particularly interesting is an ongoing study to increase the level of autonomy of AUVs pursued in collaboration with NATO STO CMRE, to enable decision making based on in-situ collected sensor data, see H. Dol and R. Otnes (2015). These solutions are mostly focused on military scenarios such as mine hunting, but will be the baseline for civil applications too. To face the challenge of interoperability, a software-defined modem has been developed by TNO and The Netherlands Defence Materiel Organisation (DMO) in collaboration with the Norwegian Defence Research Establishment FFI (S. Giodini et al, 2015) using state of the art smartphone technology.
Figure 3 shows the prototype that has been successfully tested on autonomous bottom sensor nodes (NILUS, FFI). An integrated solution within an AUV will be developed in the near future. Bringing together these two innovation paths, increased autonomy and flexible underwater communication devices, will pave the way to the future of autonomous operations.
More information
- H. Dol and R. Otnes. How smatphone indusrty made ucomms easier: Moore’s law underwater. OCEANS, Genova, Italy, 2015.
- S. Giodini, R. van Vossen, A. Duijster, B. Quesson, P. Wessels, S. Dugelay, F. Baralli and A. L. D. Beckers. Increasing the performance of autonomous minehunting operations, UDT Europe, Rotterdam, The Netherlands, 2015.
- F. Le Pennec, C. Gac, H. F. Guarnizo Mendez and C. Person, 2.4GHz Radio Transmission Measurements in a Basin filled with sea Water. OCOSS, Nice, France, 2013.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















