WiMUST – A Fleet of AUVs for Seismic Surveys
EU-funded WiMust Project Advances a Novel Appraoch to Existing Methods
The ongoing WiMUST (Widely scalable Mobile Underwater Sonar Technology) project aims to design and test a system of cooperating autonomous underwater vehicles (AUVs) that would simplify seismic surveying and offer significant advantages over modern streamer-towing operations. Seismic surveys are a crucial part of offshore exploration, producing detailed imagery of sub-bottom rock formations that enables the location and evaluation of oil and gas deposits. Other commercial, scientific and military uses include assessments of the seabed for offshore construction, installations of renewable energy infrastructure, academic studies of the geology, civil engineering projects in shallow coastal zones, etc.
Traditionally, seismic acoustic surveys are performed with a vessel that tows a powerful acoustic source (an airgun array) and one or multiple streamers - an array of hydrophones on a system of long cables. Acoustic waves from the source bounce off the sub-bottom structures and travel back to the sea surface, where the reflections are captured by the hydrophones. Post-processing of the acquired sound propagation data reveals the details about the structures beneath the seafloor.
Objectives of the survey and the subsurface complexity in the target area define the particular configuration of the data-acquisition solution. Developed over the past 50 years, contemporary methods range from 2D surveys with single-vessel narrow-azimuth passes to sophisticated wide-azimuth multi-vessel 3D surveys, and the choice of a particular survey scenario is based on balancing the required image quality with available time and cost resources while minimising risks.
Modern Seismic Surveys: The Scale
As modern technology allows the capture and processing of bigger and bigger data volumes, a large 3D survey would, for example, involve a specialised vessel that tows up to 10 parallel streamers 4 to12km in length, each containing over 300 receivers paired with accelerometers, depth and other sensors. With 17.6 square kilometres covered by its spread, one such system is, in fact, the largest man-made moving structure on Earth.
Towing such a large object may yield faster production rates, but obviously comes at a cost. Even manoeuvring a big streamer array requires significant space and time - a 10 km streamer might require up to 8 hours to turn.
While being extraordinarily well engineered solutions, the streamers present limitations that need to be overcome in order to further improve seismic acquisition quality and efficiency.
Overall, seismic surveys are highly complex operations - and increasing demand drives exploration into more and more challenging environments that require extremely sophisticated approaches. For example, ‘looking under the edges’ of acoustically opaque structures like salt domes or dense basalts might require a costly multi-vessel survey with additional source and/or streamer-towing ships (Gisiner, 2016).
Large streamer spreads are subjected to lateral drift (so-called feathering) that requires efforts to mitigate, and are exposed to significant forces that lead to risky deployment and recovery. Other setbacks include swell and turbulent flow noise that affects seismic data, inflexible source-receiver geometry, inability to operate in obstructed areas, and extensive barnacle fouling in certain areas.
Modern industry tends toward longer streamers, higher streamer counts, tighter streamer spacing. But towing such a large recording system may not be the ultimate solution in terms of the ratio of data quality to cost. Is bigger necessarily better?
WiMUST Project: The Concept
The EU-funded WiMUST project aims to fundamentally improve existing methods for geophysical acoustic surveys by ‘cutting the cable’ and decoupling the acoustic source from the system of receivers. The main novelty of the WiMUST system is using marine robots to capture seismic data instead of conventional streamers.
Discarding complex kilometre-scale structures, the 9 project collaborators advance an innovative concept where short streamers of small aperture are towed by autonomous underwater vehicles (AUVs) that work together in a cooperative formation.
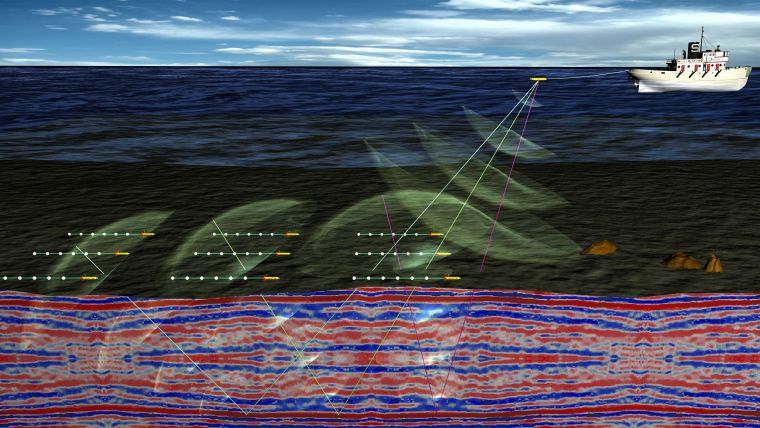
The AUVs act as sensing and communication nodes of a reconfigurable mobile acoustic network, and the whole system behaves as a distributed sensor array for recording data, obtained by illuminating the seabed and the sub-bottom with strong acoustic waves from a source(s) installed on-board a support vessel (Figure 1).
Project Partners
The 36-month WiMUST initiative started on 1 February 2015 and brings together a group of research institutions, geophysical surveying companies and SMEs with expertise in autonomous systems, marine robotics, communication, navigation and cooperative control.
The four academic partners are:
- the Interuniversity Centre on Integrated Systems for the Marine Environment - ISME (Project coordinator) - Italy
- Instituto Superior Tecnico - IST - Portugal
- Centre for Technological Research of the Algarve - CINTAL - Portugal
- University of Hertfordshire - United Kingdom
The five industrial partners are:
- EvoLogics GmbH - Germany
- Graal Tech S.r.l. - Italy
- CGG - France
- Geo Marine Survey Systems B.V. - The Netherlands
- GeoSurveys - Consultores em Geofısica, Lda. - Portugal
WiMUST System: Current Status
In 2015, the end-user partners laid out the WiMUST groundwork by defining the requirements for the system and a reference scenario to validate its performance - a 3D geotechnical seismic survey. Based on the end-user objectives, the WiMUST consortium established system specifications and outlined the roadmap for further theoretical and experimental studies in distributed sensing, cooperative control, underwater communication and group navigation. The goal is to design and test a system capable of executing a compact geotechnical survey, that could eventually be scaled to performing large 3D kilometre-sized operations.
Research in Distributed Sensing
The AUVs bring the benefits of mobility and allow for the departure from the traditional geometry of seismic receiving arrays by employing vertical and horizontal configurations. Within the WiMUST framework, the system of receivers is viewed as a distributed sensor array (DSA), free to adopt any geometry. To maximise the information content extracted from the acoustic signals, the WiMUST research efforts in determining the criteria for optimal DSA geometry follow the low field coherence approach, i.e. the sensors for seismic data-acquisition should be placed where the acoustic field is the most diverse.
Research in Cooperative Navigation and Control
Cooperative navigation and control of the AUV team is crucial for WiMUST system performance, as acquisition of seismic data with the distributed sensor array would require each receiver to be correctly placed for the desired source-receiver geometry of the mission.
WiMUST partners work on cooperative navigation and control algorithms that will accurately steer the vehicles so that all the AUVs and the towed streamers avoid collisions and maintain the specific geometry relative to the acoustic source(s). Several algorithms were investigated - the cooperative path following, where a pre-defined path is set for the formation, and the target/trajectory tracking, that imposes ’time and place’ rules - a timing law and prescribed waypoints for each vehicle to follow. A hybrid approach that combines the benefits of the two seems more appropriate for the WiMUST system and is the subject of further investigation (Indivieri et. al, 2016).
Research for Mission Planning
Efforts in mission planning for the WiMUST system are focused on an efficient planner that will generate waypoints, based on the required vehicle formation for optimal sensor array geometry, and ensure collision-free AUV streamer motions. The paths generated by the planner will be used by the navigation system to guide the vehicles along the mission phases.
Research for the Communication System
Communication architecture of WiMUST must ensure that positions of each AUV in the formation are known with centimetre-scale accuracy, and that the internal clocks of the vehicles are precisely synchronised. This is crucial to ensure that the acquired seismic data is assigned temporal and spatial tags that are consistent across the formation, as well as to derive relative positions of the vehicles for navigation and control.
The AUVs are equipped with EvoLogics underwater acoustic modems, capable of measuring distances with high accuracy even when operating in dynamic, reverberant underwater acoustic channels thanks to the adaptive spread-spectrum technology. To accurately synchronise the nodes of the distributed underwater acoustic network, the team implemented a novel integration of a chip-scale atomic clock into the modems - so the internal clocks of the sensor network nodes are synchronised with GPS on the surface pre-mission (the so-called disciplining procedure), and maintain the desired high precision when submerged (Figure 2).
Ongoing research involves implementing and testing short- and long-range communication protocols for AUV navigation and control, inter-vehicle service data exchange, as well as transmissions of seismic data samples to the support vessel for quality monitoring.
Experimental Trials
In 2015 and early 2016 in Lisbon, preliminary tests of 2 IST’s MEDUSA class AUVs towing 13-m-streamer dummies from Geo Marine delivered valuable data for dynamic modelling of the AUV streamer system, and in March 2016 Graal Tech and ISME carried out similar preliminary tests of Graal Tech Folaga AUV towing the Geo Marine dummy in the area of La Spezia, Italy.
The first larger-scale experimental trials took place in Sines, Portugal, in November 2016.
Project partners used IST’s MEDUSA AUVs, Folaga AUVs from Graal Tech and Geo Marine streamers. A catamaran from IST served as a support vessel for AUV tracking. Key challenges of the trials were to validate the atomic clock disciplining to ensure synchronised AUV timekeeping, perform synchronous clock, one-way-travel-time positioning of the vehicles, as well as testing algorithms for cooperative behaviour of the AUV swarm (Figure 3 and 4).
The trial objectives were achieved, and WiMUST partners are planning the next round of field experiments for July 2017 to experimentally verify further advances. The next step would be performing a small-scale seismic survey using a sparker acoustic source, and comparing the results with pre-existing surveys of the area (Figure 5).
Future Prospects
A robotic receiving antenna that changes its geometry is a step away from the classical ship-towed streamer solution and holds a lot of potential for significant improvement of ocean surveying.
Compared to streamer-towing, a robotic swarm system would greatly simplify marine operations from deployment to recovery - cutting the cables between the ship and seismic receivers would cut both time and cost of a survey operation. Such systems could be deployed from vessels of opportunity and work safely and efficiently in congested areas.
Using AUVs would significantly reduce risks that skyrocket project costs: where a towed system is often a survey’s single point of failure, the failure of one AUV would not compromise operation of the swarm. This is important, as whilst the geophysical survey is a fraction of a large construction project’s budget, survey delays can cause tremendous penalties incurred due to standby rates of construction equipment chartered in advance.
Offering an advantage in data quality, distributed receivers of acoustic signals could be excited from different angles, which would improve the seabed and sub-bottom resolution as well as maximise the extracted information content.
Optimising the shape of the robotic receiver formation to the specifics of a particular survey scenario is a big leap for the seismic surveying technology, and design and implementation of such systems is a challenging task that calls for significant research and experimental efforts. Forthcoming research aims to reinforce the advantages perceived today. The WiMUST project’s goal is to pave the wave for further advances and achieve results that could be scaled to 3D survey missions for exploration and development of large target dimensions.
Acknowledgements
The work of the WiMUST project collaborators received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 645141.
Special thanks are due to Giovanni Indiveri (ISME), Jonathan Grimsdale (CGG), Henrique Duarte (GeoSurveys) and Luís Sebastião (IST) for their kind assistance.
More Information
- Robert C. Gisiner (2016). Sound and Marine Seismic Surveys - Acoustics Today, Winter 2016, Volume 12, issue 4; Acoustical Society of America, pp 10-17.
- Giovanni Indiveri, Gianluca Antonelli, Filippo Arrichiello, Andrea Caffaz, Andrea Caiti, Giuseppe Casalino, Nicola Catenacci Volpi, Ivan Bielic de Jong, Daniela De Palma, Henrique Duarte, Joao Pedro Gomes, Jonathan Grimsdale, Sergio Jesus, Konstantin Kebkal, Elbert Kelholt, Antonio Pascoal, Daniel Polani, Lorenzo Pollini, Enrico Simetti and Alessio Turetta, Overview and first year progress of the Widely scalable Mobile Underwater Sonar Technology H2020 project, 10th IFAC Conference on Control Applications in Marine SystemsCAMS 2016 Trondheim, Norway, 13-16 September 2016, IFAC-PapersOnLine, Volume 49, Issue 23, 2016, Pages 430-433, ISSN 2405-8963, DOI: 10.1016/j.ifacol.2016.10.442
- WiMUST official page http://wimust.isme.unige.it/index.php/publications

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















