Electric Underwater Robotic Vehicle Supports Ocean Research
An electric underwater robotic vehicle, manufactured by Saab Seaeye Falcon, is to help support a network of oceanographic and atmospheric sensors that are part of the Ocean Observatories Initiative (OOI) transforming ocean research. Funded by the National Science Foundation, the overall OOI program is managed by Massachusetts-based Woods Hole Oceanographic Institution. The moored, mobile autonomous, and cabled sensors provide real-time data access to address critical issues such as climate change, ecosystem variability, ocean acidification, and carbon cycling.
The Falcon will conduct operations in support of mooring deployments and recoveries. This would include inspections of instruments and mooring systems, as well as attaching rigging or unfouling instruments to allow recovery of assets.
Attaching Rigging or Unfouling Instruments
After deploying a third party ROV for several years it was concluded that a dedicated underwater robotic vehicle could be a significant addition to the suite of tools available to the program and provide operational flexibility, as well as scheduling and budget optimisation.
The Falcon meets the general requirements for a vehicle that can operate in 450m of water, with a 1000m option. It has a multi-function manipulator arm and navigation system and can work from either a dynamic positioning or non-dynamic positioning vessel. A 1100m umbilical cable run will not only allow the Falcon to operate from a non-dynamic positioning vessel but allows multiple re-termination before needing replacement.
Integration of Navigational Systems
At-sea training was completed in March 2019, along with verification of mobilisation and de-mobilisation requirements, integration of navigational systems, and included operating the vehicle in currents and performing test recoveries of CGSN anchor types.
First project deployment of the Falcon was in April onboard the RV Neil Armstrong. During the multi-leg 21 day cruise, the CGSN team successfully performed mooring inspections and anchor recoveries. Future operations could take place in water depths of up to 450m and will include surveying mooring locations, locating existing anchors, and engaging hooks and lines for the recovery of anchors.
Front and Rear Camera
Systems onboard the Falcon include front and rear cameras, a Kongsberg HDTV camera, Imagenex sonar, five-function manipulator and single function manipulator with rope cutter. The Falcon’s concept comes from packing five powerful thrusters and an intelligent distributed control system into a 1 x 0.5 x 0.6 metre-sized vehicle that can adopt different tools and sensors for undertaking numerous intricate and demanding tasks. A key advantage of the Falcon’s intelligent power and control is its high manoeuvrability and mastery of strong crosscurrents whilst undertaking exacting tasks with steadiness and precision.
The observatory consists of
- The Coastal & Global Scale Nodes (CGSN) which include sensor arrays moored off the coast of Massachusetts, Alaska, and Greenland, operated by the Woods Hole Oceanographic Institution,
- The Endurance Array (EA) off the coast of Oregon and Washington, operated by Oregon State University,
- The Regional Cabled Array (RCA), a submarine cable network of sensors and instruments, operated and managed by the University of Washington,
- As well as the Cyberinfrastructure, managed by Rutgers, The State University of New Jersey.
The next planned deployment is on the Endurance Array for Oregon State University. The Falcon will be mobilised on the RV Elakha and will support shallow water anchor inspections and recoveries.
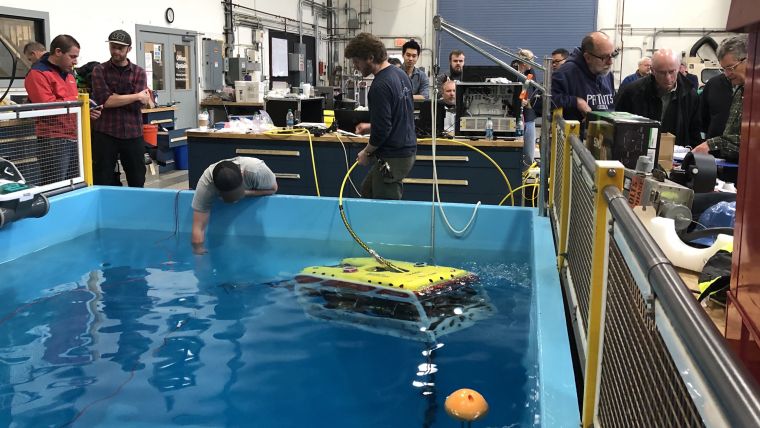
Falcon during training at WHOI’s test tank facility in Woods Hole, Mass. (Photo by Derek Buffitt, Woods Hole Oceanographic Institution).












