New technology lights up bulk ore carrier wreck location
Lying beneath the Derwent River in Hobart, Tasmania, is the wreck of SS Lake Illawarra. A recent survey has illuminated this site in a whole new way. SS Lake Illawarra was a 140-metre bulk ore carrier that struck the Tasman Bridge and sank in 1975, resulting in the tragic loss of 12 lives: seven ship crew and five motorists who were driving across the bridge.
While some may remember the tragedy and lives lost, SS Lake Illawarra is largely out of sight and mind for most residents of Hobart. Despite more than 70,000 vehicles crossing the bridge each day (the highest volume road section in Tasmania), most travellers wouldn’t think of the wreck lying beneath the surface nearby. Until now.
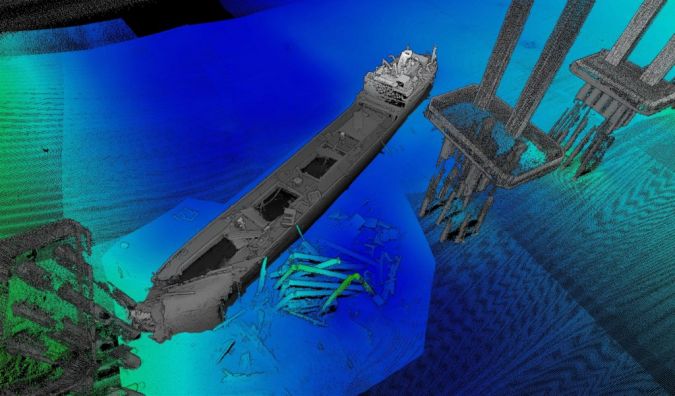
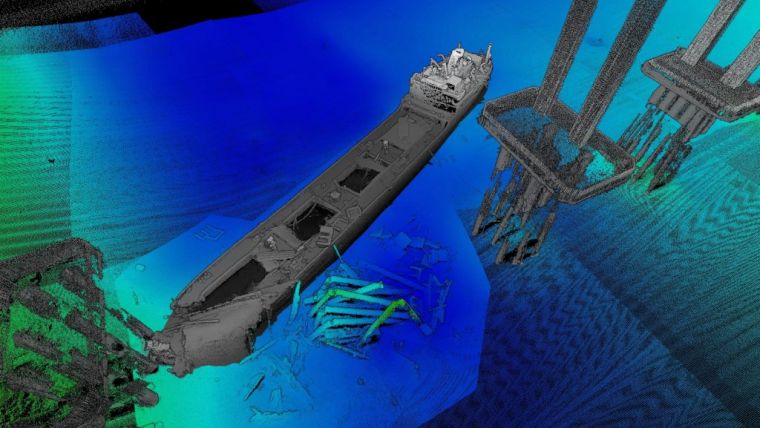
CSIRO's new mapping in partnership with Jacobs has merged light and sound to produce the first ever complete map of the wreck and its position beneath the bridge. The imagery is stunning and seamlessly brings together two separate datasets to create a complete and compelling view.
The mapping shows the SS Lake Illawarra lying next to the bridge between pylons on the eastern shore side. The bow of the ship is close to the third pylon from shore and the ship points at an angle of 45 degrees towards the middle of the river. At its highest point, the vessel is about 15 metres below the waterline. Its closest point (the ship’s bow) is about 125 metres from shore.
Mapping SS Lake Illawarra using light and sound
With Jacobs, CSIRO completed the mapping in two phases: above water a survey of the bridge pile caps, piers and decking (road), and an underwater survey of the wreck, surrounding seabed and bridge piles.
To begin with, a mobile laser scanning (MLS) system, owned by Jacobs, was mounted on the deck of CSIRO’s research vessel, RV South Cape. The MLS system was used to scan features above the waterline such as the bridge and surrounding shoreline. The bridge deck (road) and approaches were also scanned using the MLS mounted on a vehicle.
Paul Digney, technical director of data capture at Jacobs, said mobile laser scanners emit laser (Lidar) pulses that are reflected from the features they hit. “The scanner uses laser pulses to accurately map the location of features by measuring the travel time and orientation of the pulse from scanner to feature and back,” he said. “The Lidar scanner collected around three million points of data per second, at a range of 475 metres, and the entire bridge survey was completed in our passes.”
High-frequency multibeam echosounder
The team then used a high-frequency multibeam echosounder mounted to RV South Cape. This was used to survey the wreck, bridge debris, bridge pylons and riverbed. These surveys are sometimes called ‘mowing the lawn’, due to the parallel tracks used for the survey over the target area, much like mowing a lawn.
Multibeam echosounders emit pulses (‘pings’) of sound that travel to the seafloor and bounce back to a receiver. Much like the laser scanner, the travel time and orientation of the sound pulse creates a map of the seafloor and its features.