
Valeport Sensors Selected for New Micro AUV
Valeport has recently collaborated with ecoSUB who produce a micro AUV that is both advanced and cost-effective. The small and robust sensors are assisting Autonomous Underwater Vehicle (AUV) manufacturers and users to not only get the data they require, but to make AUVs more accessible in the marine environment. ecoSUB is a micro AUV (0.5 metres long) that uses Valeport’s sensors to autonomously acquire sound velocity profiles and has been jointly developed by Planet Ocean and Marine Autonomous Robotics Systems (MARS) group at the National Oceanography Centre (NOC) in Southampton.
Part funded by Innovate UK and the UK Defence Science & Technology Laboratory, ecoSUB is a disruptive system which aims to democratise the use of autonomous underwater technology in science, commercial and defence applications by using advanced design techniques, materials, sensors, Artificial Intelligence (AI) and manufacturing methods to produce an affordable yet capable AUV.
Just a few short years ago, ecoSUB would not have been possible; the ability to manufacture some of the mechanical parts required at this scale, availability of suitable power supply chemistries, and small, low power, accurate sensors and small high capability processors all conspired to keep micro-subs firmly at the concept level.
Demanding specifications
This has all changed in the past three years as potential solutions emerged. Rapid advancements in 3D printing capability, microsensors, new battery chemistries and improvements in existing ones as well as micro-miniature, low power but high-performance processors provided some of the solutions for the design team to begin the two-year journey in August 2015. Although still extremely challenging, the Planet Ocean and MARS teams set to work to engineer a capable, cost-effective vehicle to meet the demanding specifications identified by Planet Ocean in a detailed and wide-ranging market study.

ecoSUBµ-5 has a 500-metre depth capability, and target endurance of 48 hours with the ability to carry a growing range of highly capable sensors. An important design requirement was that the AUV should maintain a “cylinder rule” i.e., had no projecting control surfaces or antenna which would limit its capability for tube launch from a surface, underwater or sonobuoy tube. This is achieved by using a moving mass within the vehicle to control pitch angle. Using this technique also allows the combined antennas and location beacons, which are coaxial to the main vehicle body, to be adequately exposed for communications and GPS positioning at the surface. When the mass is fully forward, the vehicle can effectively stand on its nose. An added advantage of this is the ability to dive at extremely steep angles providing a unique profiling capability.
Sensors on micro AUV platforms
As part of the design process, Planet Ocean sought early engagement with sensor manufacturers to encourage them to consider deployment of their sensors on micro AUV platforms with all that this entails in terms of size, power and weight. An early adopter of this philosophy was Valeport. Based in the South West of England, Valeport has an enviable reputation for producing high-quality sensors designed and manufactured in-house with the inherent ability to adapt quickly to meet the needs of potential end users such as ecoSUB.
One of the many potential applications of micro-AUV technology identified by the market study was an alternative to the XBT (expendable bathythermograph). The XBT has been used by oceanographers for many years to obtain information on the temperature structure of the water column. Adopted later by naval forces and others to locate the thermocline and by adding conductivity sensors to facilitate calculation of the speed of sound for sonar calibrations.
Temperature plotting as a function of depth
The XBT is dropped from a ship and measures the temperature and conductivity as it falls through the water. Two very small wires transmit the temperature data to the ship where it is post-processed to provide temperature-salinity profiles. The probe is designed to fall at a known rate, so that the depth of the probe can be inferred from the time since it was launched. By plotting temperature as a function of depth, the user can get a picture of the temperature and salinity profile of the water column. Using standard formulae, speed of sound can be calculated from this information. Although extremely useful XBT technology has a number of limitations. First, data is provided only directly below the deploying platform (ship), second, important data such as depth and salinity are calculated or inferred rather than measured, and third, XBT’s are one-shot devices providing a single profile per XBT. These limitations are addressed using ecoSUB technology combined with a time-of-flight sound velocity sensor provided by Valeport.
Sound velocity sensor
Using an ecoSUB-µ5 combined with a specially adapted Valeport SV (sound velocity) sensor provides a real-time physical measurement of the speed of sound, accurate depth information, and the ability to make multiple SV profiles at several locations autonomously. By clever data compression techniques, ecoSUB can deliver a full sound velocity downcast with the speed of sound, depth and lat/long every metre through 290 metres in a single Iridium Short Burst Data (SBD) message before being deployed to a new location to repeat the process. Of course, this can be extended to 500 metres with up and downcasts using multiple SBD messages or adjusting the interval from less than 1 metre to more than 1 metre as required in the mission plan. This provides decision-makers with a very detailed 3D map of the underwater acoustic environment over a wide area in near real-time and in advance of the host vessels arrival at the location. Making an accurate physical measurement of sound velocity reduces errors inherent in calculating sound speed using multiple sensors each with its own error band.
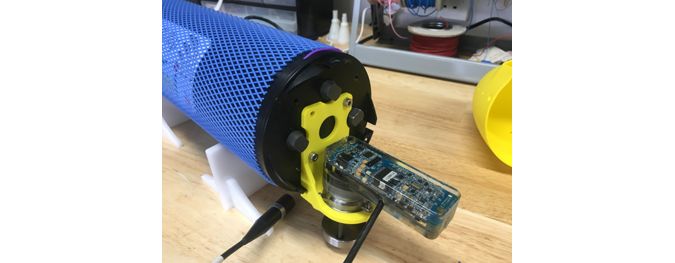
New nose cone
Typically, ecoSUB sensors and electronics are located within the free flooding nose cone of the vehicle. To accommodate the Valeport sensor, a new ecoSUB nose cone was required. Valeport provided pressure tolerant electronics that could be fitted within the nose cone and perform at pressures of 50 Bar or more. In addition, Valeport were asked to provide a sensor with the shortest possible path length to minimise the drag experienced by the vehicle whilst providing the required exposure for the sensor to maintain performance as well as making the electronics package as close to naturally buoyant as possible.
When diving at a steep dive angle, the ecoSUB naturally spirals keeping the footprint of the dive extremely tight, this can be enhanced further by applying full right or left rudder as part of the profile dive behaviour.

Exercise in the North Sea
The first batch of five vehicles were produced in May 2018 and were subjected to extensive sea trials before being supplied to the customer. At the time of writing, four vehicles are being prepared for deployment on an exercise in the northern North Sea. The subs will be piloted remotely, using the Iridium channel which with the aid of a specially designed C3 base station allows over the horizon communications with the subs in an internet denied environment. New missions or alterations to existing missions can be uploaded on the fly when vehicles are on the surface.
Pre-processed information
Working with stakeholders, particularly in the energy and defence sectors, there is a growing understanding that in some circumstances, information can be more valuable than data. This often means that decision-makers need to be provided with pre-processed information rather than complex datasets to allow them to make speedy yet educated decisions. An example of this is in ASW, where knowledge of the depth of the temperature inversion layer is required. By processing the sound velocity data onboard the ecoSUB and simply sending a subset of the data located around the inversion depth or even a concise report along the lines of “thermocline at 40.55 metres lat 0° 00′ 0.000 ″long 0° 00′ 0.000″” raw data is always available and stored locally for use offline as required.
Mindful of the value of the data collected, facilities have been incorporated for erasure of the data remotely if necessary.
Valeport have also provided specially commissioned versions of their Hyperion Fluorimeter system with a fast time constant temperature sensor and echo sounder for use specifically on ecoSUB vehicles. ecoSUB Robotics is currently developing a range of payload configurations and firmware modules suitable for combat hydrography and other defence applications. The vehicle is currently available in two variants - the micro (µ) 500 metre rated (1 metre in length) or 2,500 metres rated.












