New Golden Age of Exploration
Jyotika Virmani was executive director of the Shell Ocean Discovery XPRIZE before she entered Schmidt Ocean Institute (SOI), also as executive director. Two positions at the forefront of state-of-the-art and...

Jyotika Virmani was executive director of the Shell Ocean Discovery XPRIZE before she entered Schmidt Ocean Institute (SOI), also as executive director. Two positions at the forefront of state-of-the-art and...
Hydrographic measurements are nowadays usually carried out using multibeam echosounders (MBES). The measurements obtained by each operational hydrographic vessel need to be regularly controlled on a well-known area to validate...

Autonomous underwater vehicles are becoming more and more common in the maritime industry, and technology is rapidly developing for different applications, such as inspection, maintenance and surveillance. Meanwhile, more advanced...
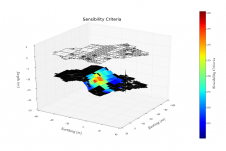
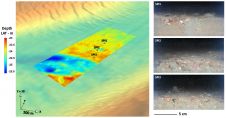
Currently, calibration of multibeam echosounders (MBES) for hydrographic surveys is based on the traditional ‘patch test’ method. This subjective method, although rigorous, has major drawbacks, such as being time-consuming (in...

Leading geo-data specialist Fugro has chosen underwater positioning technology from Sonardyne for its upcoming offshore wind farm projects in North America. The company has ordered three Sonardyne Mini-Ranger 2 Ultra-Short...

Depth-rated to 11,000 metres, the ISA500-11K provides the highest levels of stability, accuracy and range, setting a new standard for deepwater altimeters. Based on the architecture of the ISA500 range...

iXblue, a provider of navigation, subsea positioning and imagery solutions, announces the launch of the Gaps M5, a new compact, export-free and omnidirectional USBL system for accurate location, positioning and...

Underwater technology provider Sonardyne International Ltd has announced new additions to its 2020 product line-up. With a focus on compact yet capable unmanned and vessel instruments, Sonardyne has unveiled SPRINT-Nav Mini,...

Mark Heine is chairman of the board and CEO of Fugro, with the headquarters in the Netherlands. Fugro is the leading and largest specialised survey company in the world, serving the full lifecycle of assets, and calls itself a Geo-data specialist. For the avid mountaineer Heine, challenges are never too high to take on, not even heading up a multinational in transition, from a company largely dependent on the oil and gas industry to one that wants to co-create a sustainable and liveable world. We talked to Mark Heine about leadership style, strategies for finding new employees, and Seabed 2030. About this ambitious project, Heine says ‘Commercial companies need to work together with NGOs and academia to make this happen.’ Mark Heine is chairman of the board and CEO of Fugro, which is headquartered in the Netherlands. Fugro is among the leading and largest specialized survey companies in the world,...

Oceanology International will be celebrating its 50th anniversary this year. Over 500 companies from more than 90 countries will be exhibiting and there will be two brand new pavilions: Italy...
This site uses cookies. By continuing to use this website, you agree to our Cookies Policy. Agree