Lidar Seafloor Classification
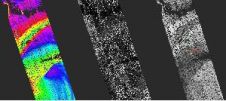
Airborne Lidar (Light Detecting and Ranging) is a well-established remote sensing technique which scans the terrain and seafloor with high-frequency laser pulses. Until now, bathymetric Lidar data has been processed...
Airborne Lidar (Light Detecting and Ranging) is a well-established remote sensing technique which scans the terrain and seafloor with high-frequency laser pulses. Until now, bathymetric Lidar data has been processed...

In hydrography, we are used to working underwater where no positions are available from satellite navigation systems. In other professional fields, experience has shown that position updates from satellites may...

The wide-band high-resolution multi-beam EM 2040 was released at FEMME 2009 user conference in Lisbon (Portugal). The EM 2040 is designed to meet all requirements for shallow water mapping and...
With increasing accuracies of positioning and multi-beam systems, alignment of the motion reference unit (MRU) is becoming increasingly important. Although most (if not all) multi-beam surveyors use the patch-test to...
This article is about my thesis project, which I did in collaboration with Auke van der Werf at the Dutch Nautical Academy at Terschelling (the Netherlands). The research for the...

The alignment of the motion reference unit (MRU) is important for the accuracy of a multi-beam survey. The patch test is mostly used to solve angular offsets between the multi-beam...
Many hydrographers consider the Combined Uncertainty and Bathymetry Estimator (CUBE) algorithm a useful aid in processing bathymetric data and ‘measuring’ survey quality. This paper discusses extending the use of CUBE...

Kongsberg Seatex, the position reference systems division of Kongsberg Maritime celebrated a significant achievement in the development of its Motion Reference Unit (MRU) today (March 11th 2008) by presenting Subsea...
The Mobile & Marine Robotics Research Centre describe their motivation for building their own Smart ROV based on previous survey experience and the preparations they are now undertaking to integrate...
The Student Autonomous Underwater Challenge – Europe (SAUC-E) is an annual event providing an opportunity for student-led teams to design and build a small autonomous underwater vehicle (AUV) to compete...
This site uses cookies. By continuing to use this website, you agree to our Cookies Policy. Agree