
The presence of suspended sediments in water bodies presents significant challenges for the dredging industry. Existing methods to determine nautical depths are intrusive single point methods relying on in situ density or shear strength measurements1,3 or low-frequency single-beam echosounder recordings1,2. The use of single-beam echosounders is however systemically problematic as they are not practical in satisfying the CATZOC A1 coverages required for contemporary electronic navigational charting.
Here the author describes a method to obtain ZOC category A1 for areas exhibiting suspended mud using multibeam echosounders operating at an ultra-wide frequency range of 80–400kHz. This method reaches the nautical bottom as well as single-beam systems and generates high-resolution full search bathymetric maps.
Problem definition
The acoustic methods used in various studies have shown how different frequencies penetrate different mud layers2. 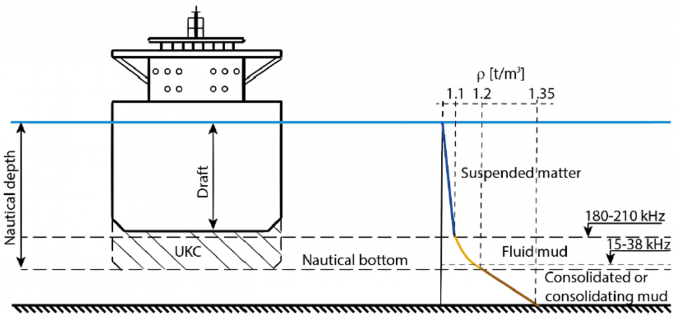
As can be seen, typical multibeam frequencies higher than 200kHz propagate through the water column until meeting the fluid mud layer. In some cases, high-frequency signals punch randomly through the fluid mud so that the resulting data is broken up between the upper and lower layers of the floor, interfering with the operation of sonar systems conducting bathymetric surveys. The problem is illustrated in Figure 2.
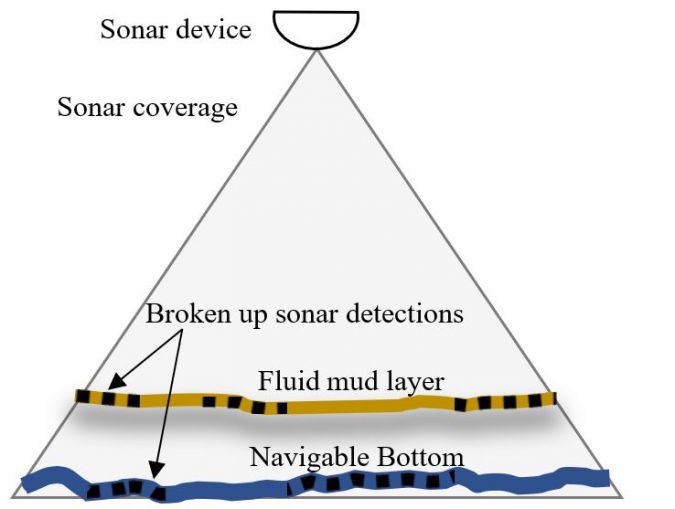
The task is therefore to provide a solution capable of detecting each layer separately and reaching the navigable bottom for wide swath area coverage.
LMD method – how to map through fluid mud
NORBIT previously introduced ultrawide-band frequency modulated operation – often called multispectral backscatter (MSB) – which makes it possible to derive properties of the signal at the low end and high end of the spectrum simultaneously. The extension of that technique into layered media detection (LMD) utilizes FM signals extending from 80kHz to 400kHz and facilitates additional determination of bathymetry from the stratified sea bottom by exploiting the different penetration depth of different frequency bands. At the same time, high-resolution bathymetry maps are obtained by employing proven beamforming and a new LMD technique that utilizes the specially designed ultra-wide FM signal to its full potential in characterizing the layered seabed for detailed seabed analysis.
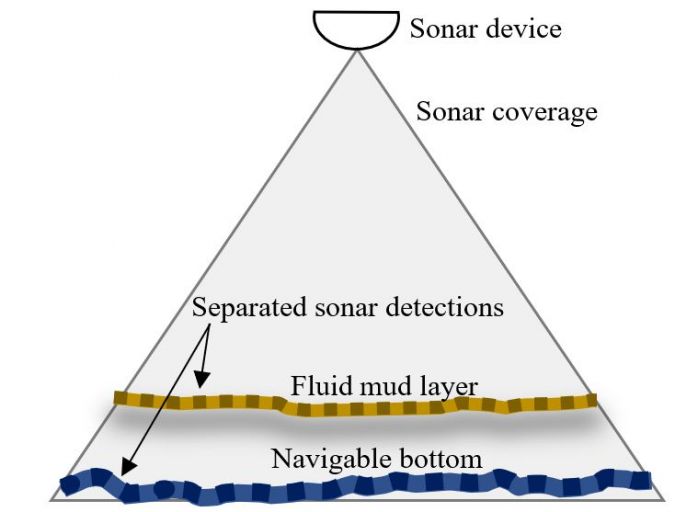
The method proposed involves the clear identification of both layers, avoiding the typical problems with narrow-band high-frequency sonars. It operates by using two concurrent detection processes within the same broadband signal, each at different frequency bands to identify separate layers. Different frequency bands penetrate different depths in the layered media. High-frequency bands are more effective at detecting suspended sediments near the surface of the top layer, while lower frequency bands can penetrate through to the deeper layers, efficiently characterizing each stratum of the seabed (see Fig. 3).
The high-frequency part of the signal, identifying the top layer (compare Fig. 1), guides the detection process for the subsequent lower frequency end of the wide-band signal. The entire signal processing occurs simultaneously in the sonar hardware, requiring no manual intervention, and is seamlessly integrated into real-time operation.
Using lower frequencies inherently reduces the system’s resolution, necessitating a careful balance in selection of the frequency and the physical size of the system. Frequencies between 80kHz and 120kHz have proven to be a good compromise for the lower end of the acoustic spectrum, providing adequate penetration without significantly compromising acoustic resolution. This is especially suitable for dredging operations with system apertures around 0.5m producing an angular resolution in the order of 2 x 2 degrees.
LMD in action
Implementation of the LMD method into bathymetric systems is only possible for highly advanced sonar platforms. These highly advanced devices are capable of volumetric signal processing and operate with ultra-wide broadband signals produced by the newest achievements in acoustic transducer technologies. The LMD technology was developed by NORBIT in its powerful WINGHEAD sonar platform called i87S. The sonar is capable of projecting high-power FM signals with an ultra-wide bandwidth (80–400kHz), enabling operation of the LMD method.
The above method was deployed and tested in several places in USA ports and harbours. One survey was carried out in the vicinity of Kings Island in the Savannah District in the USA. This area was chosen as it is known to contain fluid muds. The NORBIT i87S system was installed on the survey vessel along with the RheoTune sampler and a 28kHz single-beam echosounder for comparison.

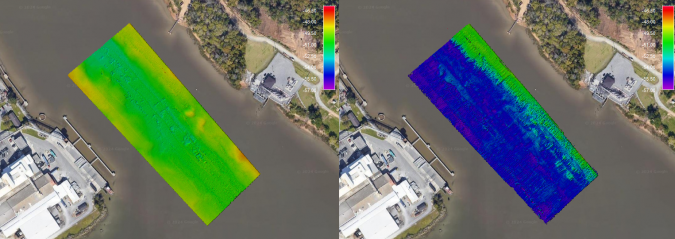
The system was configured to output both frequency bands at the same time to show how a typical survey with high-frequency multibeam sonar would compare to the LMD sonar. The left-hand side of Figure 5 shows the surface obtained from the 370kHz-band processing and the right-hand side of the figure shows the processing result of the 80kHz band. As can be seen, the high-frequency image shows the top of the fluid mud broken up, with some gaps sporadically punching through the top of the mud. The data has been cleaned and gaps interpolated to show the entire area. Here, it would not be possible to see a navigable bottom as most of the sound is reflected from the top surface and cannot penetrate to the lower layer. On the right-hand side, the low frequency spectrum shows what lies underneath the fluid mud. It shows an average of 6 feet penetration and dredge marks in the deeper sections, now fully covered by mud and inaccessible to a typical multibeam sonar.
Another nearby area in the Turning Basin (Fig. 6) was also surveyed with the LMD method and the sonar was also configured to output data from both the low- and high-frequency band for comparison.
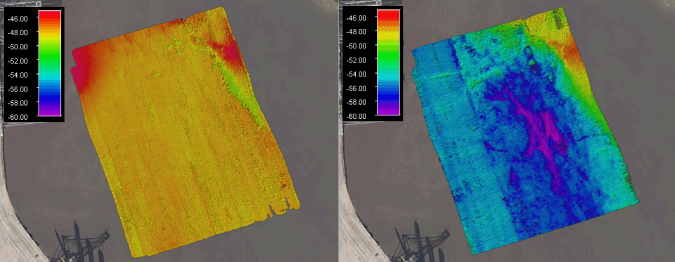
Similarly to the previous case, the high-frequency band data shows the top of the fluid mud surface. This data is broken up due to alternating detections between the upper and lower layers and indicates typical data obtained with a standard high-frequency multibeam sonar. What lies – on average ten feet – below that blanket is the navigable bottom shown in the right-hand side of Figure 6. Some deeper areas (up to 15ft) are also visible, most likely resulting from dredge activity and other morphological features normally impossible to visualize using single-beam echosounders due to the low sampling density and low resolution.
Validation
The data obtained with the LMD method was validated against the proven 28kHz single-beam echosounder survey and showed a good match under the presence of fluid mud in the location described above.
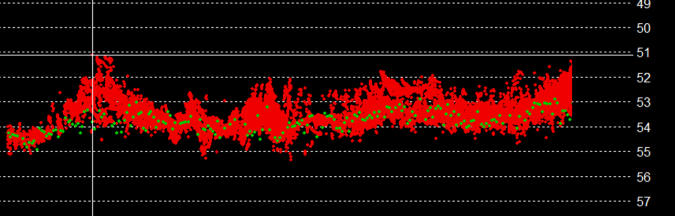
The agreement of the 80kHz band of the i87S with the 28kHz single-beam echosounder shows that fluid mud penetration can be obtained using a powerful multibeam system where the detection process of the low-frequency band is guided by concurrent processing of the high-frequency band. This cooperation between high and lower frequency bands makes it possible to successfully and robustly discriminate between the layered sea bottom, even with the swath bathymetry systems covering large areas during the survey.
Conclusion
A novel approach for mapping of the navigable bottom under fluid mud conditions was implemented in the NORBIT i87S sonar system using the layered media detection method. This was achieved due to the concurrent processing of the low- and high-frequency band of the ultra-wide FM modulated signal produced by a powerful multibeam sonar. The mutual interaction between the concurrent processing of these two bands in this method efficiently discriminates between the stratified seabed and detects the navigable bottom without the destructive interaction of the suspended layers.
Despite the unique processing power and modern capabilities, the sonar size and weight have been minimized and it is possible to install and operate the system by a single person as a portable installation.
References
- Present Practice of Using Nautical Depth to Manage Navigation Channels in the Presence of Fluid Mud, Timothy L. Welp and Michael W. Tubman, ERDC/TN DOER-D19, May 2017
- Alex Kirichek et al., How navigable are fluid mud layers?, PIANC-World Congress Panama City, Panama 2018
- E. Reincke, Determination of the nautical depth, a literature review, Ministerie van Verkeer en Waterstaat, Directoraat-Generaal Rijkswaterstaat