Landing on the abyssal plain
Positioning a deep-sea crawler for polymetallic nodule mining
Electrification and the transition to a green economy are rapidly accelerating the demand for metals and rare earth minerals. As this demand cannot be met by recycling existing metals, a number of land-based mines are depleting their reserves with an ever increasing environmental and societal impact. Space mining is not a reality for the near future, and so governments and companies are looking into obtaining these crucial metals from the bottom of the world’s oceans. This is the story of Global Sea Mineral Resources’ (GSR’s) efforts to develop a new, responsible mining industry.
Polymetallic nodules
Polymetallic nodules are rock concretions that form on the abyssal plane and that contain a wide variety of metals and other rare earth minerals. These nodules can be found in all of the world’s oceans, but their metal content and appearance can differ, depending on their location. The size can vary from a few millimetres in diameter to over ten centimetres. The exact way in which they form is still under debate, but it is widely believed that they start out from a hard substrate around which metals in the water column or sediment gather to slowly form a polymetallic nodule. This hard substrate can be a piece of rock or it may be something more interesting, such as dolphin ear bones or even teeth from prehistoric megalodon sharks.

The nodules that garner the most interest are those with the highest content of the metals needed for the transition to a green economy. In one area, called the Clarion-Clipperton fracture zone (CCFZ), the nodules are particularly rich in manganese, copper, cobalt and nickel: metals that are crucial for the production of batteries, solar panels and wind turbines. The CCFZ is an area of about 4.5 million km² in the Pacific Ocean, situated roughly between Mexico and Hawaii. The International Seabed Authority, which has jurisdiction over this area, has so far only signed contracts for exploration, and GSR was awarded one licence area in 2014 with a total surface area of about 75,000km².
Resource definition
Quantifying the polymetallic nodules is the first crucial step in estimating the viability of deep-sea mining. Knowing where the nodules can be found and in what numbers has a significant effect on the procedure and operational schedule of the collection system.
In 2014, GSR organized a first research campaign to the CCFZ with a hull-mounted Kongsberg EM120 multibeam echosounder (MBES), to get a full low-resolution overview of the licence area. During this campaign, 75,000km² of Pacific seabed was mapped and all of the data collected was shared publicly. As a result, this multibeam data is now part of the GEBCO Chart to contribute to Seabed 2030.
Based on this data set, GSR drafted a preliminary resource model and defined several areas of interest. These were visited one year later, in 2015, using an autonomous underwater vehicle (AUV) that combined MBES measurements with sidescan sonar data and high-resolution pictures of the seabed. Other samples were also gathered, such as boxcores, multicores and water samples. With this data, advanced models were made to estimate the nodule abundance.
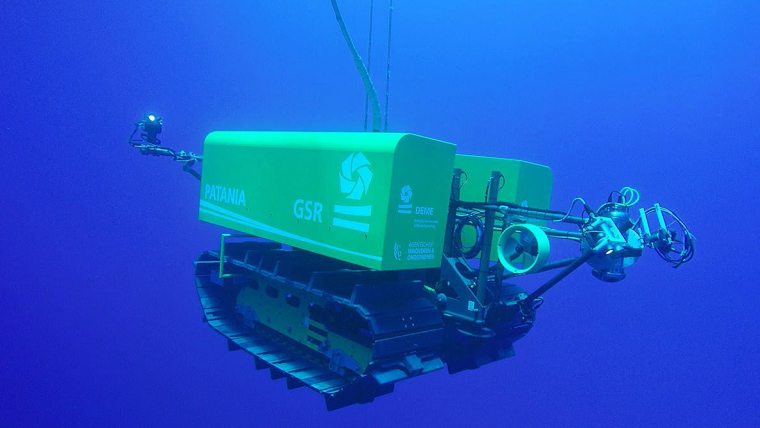
Patania I
Using the data gathered in this survey, GSR started to develop a tracked soil testing device. The focus was on testing the performance of a tracked vehicle on the seabed of the Pacific Ocean, while also gaining practical experience in the development of vehicles that can go 5,000m deep and drive around on the seabed. The device was named ‘Patania I’, after the world’s fastest caterpillar.
With the development of Patania I, a reliable positioning system was required. Many options were considered, but because of the limited requirements for these first trafficability tests, a simple setup was chosen with an ultra-short baseline (USBL) system on the vessel and an inertial navigation system (INS) with coupled Doppler velocity log (DVL) on the crawler. A Sonardyne Ranger 2 was used for the USBL system and Phins was selected from iXblue for the INS. It was clear that the raw position of the USBL would not be accurate enough at these depths, so it was suggested that the INS would filter out the jumps and give a smooth position in combination with the DVL. In the field, however, the inaccuracy of the USBL was found to be too great at depth for the INS to filter it properly. This resulted in small fluctuations in the position of the Patania. If it were an ROV, this would not have been a big issue, but as the vehicle was known to be standing still on the seabed, every movement that the navigation screen showed was one too many. It also made it very difficult for the operators and the automatic driving system to control it properly. To resolve this issue, it was decided to disable the USBL input in the INS and continue in pure INS/DVL mode. This gave a very stable, usable position, but with a long-term drift. As the Patania drove an average of five kilometres each dive, the positioning error of five metres at the end was however considered to be acceptable.
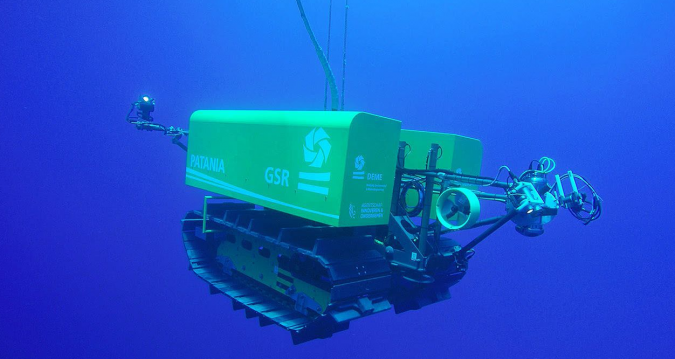
Patania II
After the success of the Patania I, GSR developed a bigger vehicle that, while still a pre-prototype, not only drove around but also tested a harvesting system. Tests had already been performed in a lab, but the system had to prove itself in situ. While Patania I was about the size of a small car, Patania II was more the size of a truck with a length of ten metres and a height and width of about four metres. It had four hydraulic collectors in front that used the Coanda effect to lift the nodules without touching the seabed.
Beside technical trials, Patania II was also built with the purpose of carrying out pilot mining impact studies. In collaboration with universities and research institutes from all over the world, it was agreed to clear an area of about 20,000m² of nodules and to study the impact of this on the environment. For this, a more robust positioning system was clearly required with an accuracy that did not deteriorate over time, as the aim was to achieve a constant relative position accuracy of about 25cm. This ensured that an entire surface could be cleared efficiently by driving a lawnmower pattern.

As the INS/DVL setup performed well with Patania I, the same equipment was used for this new positioning setup, although with an input to correct the long-term drift. The obvious way to do this would have been with a long baseline (LBL) array of half a dozen transponders on the seabed, but this solution was disregarded as it would take too long to deploy and calibrate such an array at such depths, so far offshore, for trials that would last just a few days. The solution therefore was to use sparse LBL, which provides near-LBL accuracies using just one or two transponders by combining the ranges with the information that is already in the INS. This provided the required accuracies without the vessel time that the deployment of a full LBL array would need.
The Ramses from iXblue was selected for this task with two transponders on the seabed. A box-in was done on one of the transponders, and the second transponder was to receive an accurate position through SLAM calibration. This would fix the position of the transponder by driving alongside it. Unfortunately, this did not work out in practice as the angle between the vehicle and the transponders on the seabed did not vary enough for it to calibrate properly. A second issue arose just before the crawler arrived at the seabed when, due to the immense pressures at this depth, the subsea cable towards the Phins shorted for a second, resulting in a restart of the INS. This caused a bad initial position and a discrepancy between the USBL and sparse LBL data. There was only one opportunity to fully test the positioning system during the entire campaign, and unfortunately this did not work out as intended. However, the data that was collected showed in post-processing how the system could have performed without these issues, and that looked very promising.
Mining impact studies
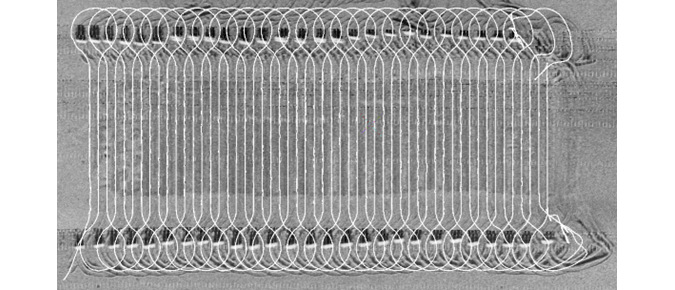
These positioning issues had a very limited effect on the mining impact studies, as the pure INS/DVL positioning was accurate enough to provide full coverage of the mining area. In Figure 5, the live position can be compared with a sidescan survey that was performed afterwards. The darker zone in the centre is the area that was cleared of nodules, and the heaps at the top and bottom are the nodules that were deposited by Patania II.
Conclusion
Both the team from GSR and the teams of scientists that joined the campaign were thrilled with the results. After all, this is the first time in history that thorough environmental data has been collected to study the impact of a new industry before the industry starts. All of the environmental data gathered is publicly available and has been shared with universities, research institutes, governments and international organizations all over the world. This data will be used to assess the impact of collecting these nodules and as a basis for international legislation for this new emerging industry.
References
Metal-rich nodules collected from seabed during important technology trial | DEME Group (deme-group.com)

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















