
Testing and analysing uncrewed survey methods
The French Navy's Hydrographic and Oceanographic Service (SHOM) tests iXblue DriX USV
SHOM – the French national hydrographic service – is planning to replace most of its aging seagoing assets in the near future and, in this context, a four-week sea trial took place in Brest, on the Atlantic coast of France, in September 2020. These trials involved two DriX unmanned surface vessels (USVs), as well as the French Navy hydro-oceanographic vessel Beautemps-Beaupré, in an area very familiar to SHOM, where major differences between traditional survey methods and autonomously executed surveys could be easily spotted and analysed.

Bathymetric surveys and line keeping
During a period of two weeks, a single DriX performed hydrographic and geophysical surveys. Subsequently, two DriXs operating simultaneously performed the same surveys during a period of ten days. The quality of the bathymetry of several of SHOM’s reference surfaces was assessed, ranging from 10m up to 210m in depth, and at different speeds. The survey sites were at the “Fosse d’Ouessant” with a depth of around 200m, the “Pierres Noires” at 60m, the “Carré Renard” at 20m and the Bay of Douarnenez at 10m.
At the same time, a survey was performed by the RV’s own manned hydrographic launches. This allowed a direct comparison between two assets fitted with the same Kongsberg EM2040C and performing in the same environmental conditions.
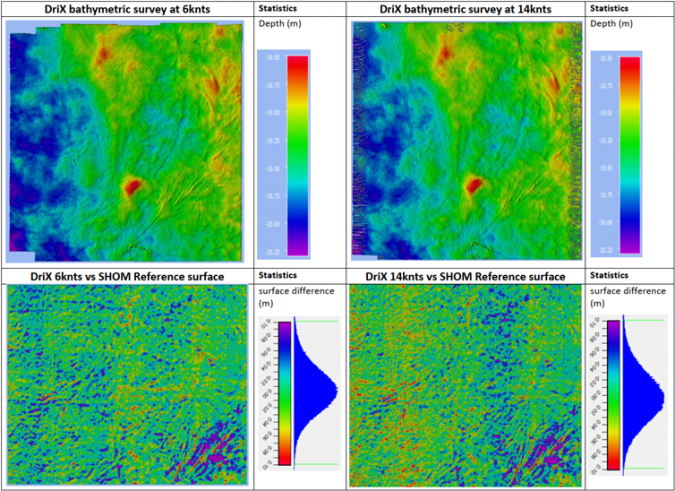
The following figure displays two surveys performed by the DriX at both 6 knots and 14 knots on the Carré Renard on a 0.5m grid size. A comparison was made each time with SHOM’s reference surface. Depth ranged from 18.5m to 20.25m. On the comparison chart, the data distribution is between -0.10m and 0.10m, with a mean difference of 0cm for the 6kn survey and 1cm for the 14kn survey.
Line-keeping capability
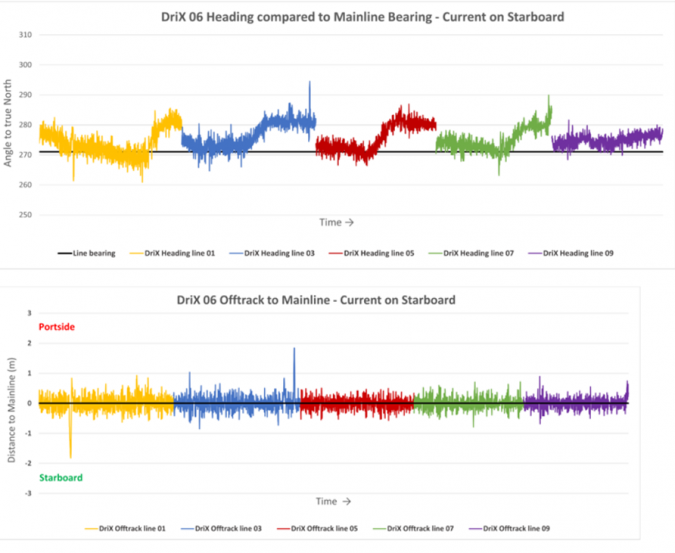
The DriX line-keeping capability was monitored when surveys were performed just north of the “raz de Sein” during spring tides, with a side current of up to 2.5 knots. The first figure below illustrates the DriX autonomous heading adjustment while running survey lines (one line for each colour), compared to the theoretical line bearing (black line). The second figure shows the evolution of the off-track distance to the theoretical line. Each line is about three kilometres long.
It is worth noting that the DriX autopilot constantly adapts to the environment in order to match the CoG (Course over Ground) to the line plan. This is generally achieved 99% of the time, within a metre.
Obstacle avoidance capacity
Among the dozen DriX functionalities tested during these trials, the DriX’s obstacle avoidance capacity was put to the test with buoys and vessels deployed in the area and surrounding the DriX during its missions. The purpose of these tests was to determine possible improvement areas in the DriX Artificial Intelligence dedicated to obstacle avoidance and based on information provided by a Lidar and an infrared camera.
During navigation, the DriX is constantly aware of the situation around it and can change the course of its mission. This concept of operation is also known as supervised autonomy or the ability of the USV to operate autonomously to achieve high-level mission goals, while being supervised by a remote operator who can take over the USV control whenever the circumstances require.
The obstacle avoidance test was conducted in two parts:
- The DriX’s ability to avoid anchored or drifting objects (buoys of several sizes from 10cm to 40cm radius were placed on the DriX’s path);
- Ability to avoid moving objects (several vessels from fast rescue boats to survey launches sailed on collision course towards the DriX from different angles and at different speeds. In a second section, two boats circled around the DriX to monitor its detecting capabilities and trajectory calculation).
The obstacle avoidance capacity was also tested in a real-life situation during the survey phase.
At the time of the trials, the radar was still under development and not integrated into the DriX obstacle avoidance system. This reduced the DriX’s capacity to detect high-velocity targets. Without the radar, the DriX obstacle avoidance system relied on the detection ranges of the Lidar and cameras, which seldom exceed 200m, thus achieving a very limited provision of warning on fast incoming surface tracks. It is worth noting that since these sea trials, a radar has been added to enhance the obstacle avoidance algorithm. Additional external sources such as a vessel’s AIS position, S57 interpretation or defined exclusion zones are now also decoded to strengthen the algorithm.
Quiet environment
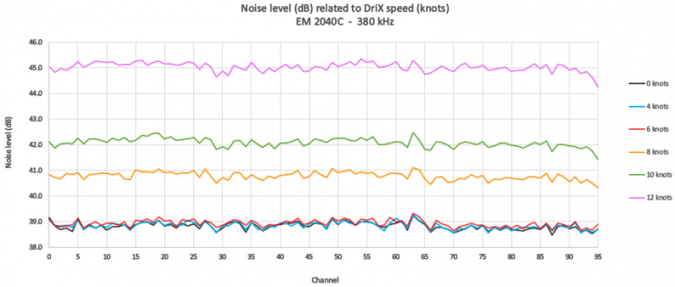
Several noise tests were performed during the trials. This was done by recording data from the MBES transducer channels while the DriX was sailing at different speeds.
The DriX and the survey launch were both fitted with the same MBES (a Kongsberg 2040C). Noise measurements were extracted from the MBES built-in test function. Results show a level of noise significantly lower for the DriX-gondola-mounted 2040C than for the survey launch one (60dB at 6 knots), and the increase in noise was significantly lower. This will have three main benefits:
- The ability to perform surveys at higher speed with wider swath;
- The ability to increase range of detection and maximize swath width;
- Reducing post-processing time thanks to cleaner data (no spikes).
This noise difference was due to several factors:
- The position of the transducer in the gondola with respect to the DriX hull;
- The hydrodynamic shape of the DriX and the gondola;
- The material that the gondola is made of.
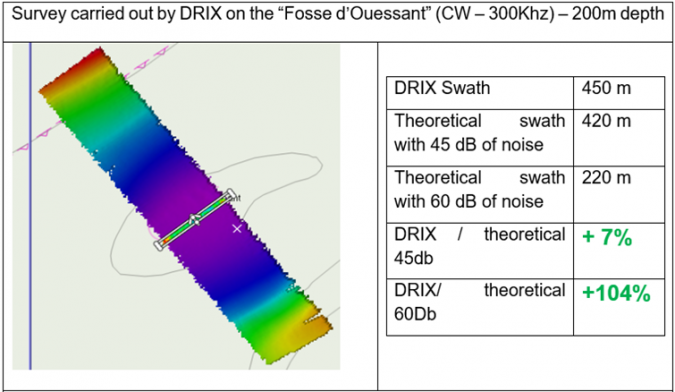
The table below illustrates the effects of noise on the detection range and theoretical swath, depending on the depth, the type of signal (frequency-modulated FM or continuous wave CW), and depth.
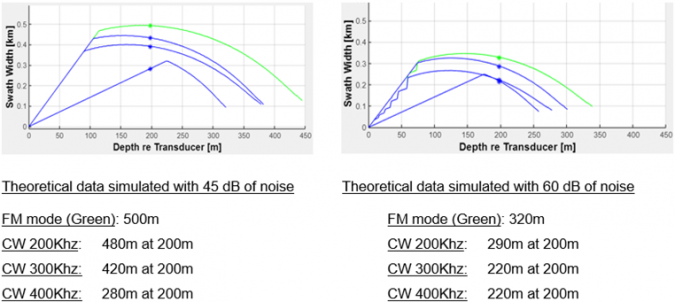
This theoretical range obtained at both 45dB (DriX measurements) and 60dB (survey launch) was then evaluated in real conditions in the “Fosse d’Ouessant” area that is around 200m deep.
Results show that the swath obtained in real conditions by the DriX is very similar to what was calculated in theory, and the gain in swath width in reduced noise environment conditions is more than double.
Based on other survey area tests, results computed by SHOM also show:
- IHO special order bathymetric survey validated at 10 knots for up to 20m of depth (sea state 1);
- IHO order 1a bathymetric survey validated at 13 knots for up to 20m of depth (sea state 1);
- Surface covered per day with one DriX is up to five times more than a conventional survey launch;
- No impact of the sub-bottom profiler acquisition on bathymetric data;
- Reduced time for post processing with a cleaner unspiked raw dataset.
Regarding that last point, using a DriX the figures observed during the trials are:
- Data collection: 1 day;
- Data cleansing: 0.3 days;
- Data reporting: 1 day.
Versatility
The other interesting point is that the work environment for the hydrographer remains the same as for on-board traditional assets. The hydrographic computer is installed on board the DriX USV, and the hydrographer accesses it from the relative comfort of the mother survey vessel.
Concerning versatility, the DriX, as fitted for these particular trials, could not outperform the traditional survey launch, mainly due to its two-metre draught. However, since the trials, iXblue has found solutions to reduce the DriX draught to under one metre, giving the USV access to these kinds of very shallow water areas.
Endurance
Endurance is always hard to determine accurately. It is hugely affected by the meteorological environment, as well as payloads and gondola shapes. Two trials were dedicated to this on 24/24 operations over two periods of three days each, with one and two DriXs. Although the speeds were not constant and the DriX configurations were different, an endurance of six knots for six days was extrapolated on this occasion. This is compared to a small, crewed vessel that has a maximum endurance of 12 hours.
Hydrographical capability
Survey launches are currently able to perform sediment sampling and have the capability of towing additional sensors such as a magnetometer or a side-scan sonar. At the time of the trial, the DriX did not have the ability to tow these types of sensors, hence this gap in the analysis. Since the trials, iXblue has developed a new solution that allows the DriX to tow several magnetometers and a side-scan sonar while performing bottom imaging and/or UXO surveys. This now surpasses the ability of a survey launch, except for station tasks.

Conclusion
Thanks to the support showed by the French DGA, SHOM and the crew of the French Navy vessel Beautemps-Beaupré, iXblue was able to prove that the DriX USV is a useful hydrographic tool. In the time between the trials and the writing of this article, a lot has been done. The DriX is now able to perform its own sound velocity profile, to conduct over the horizon missions, a navigation radar has been implemented and a towing solution is being finalized for magnetometers and side-scan sonars, to name but a few new developments. In the end, it was evident that interfacing new and old technologies could easily be done.
The DriX, that accumulates over 10,000 hours of operation, is an 8m-long Unmanned Surface Vessel (USV) dedicated to hydrography. It is able to conduct both remote-controlled and supervised autonomous operations (within visual range or over the horizon), even in complex weather conditions, thanks to a highly hydrodynamic monohull and a drop keel that provide the USV with great stability and balance, even in high sea states. This provides high seakeeping and line keeping (up to sea state 5) and speed capabilities (up to 14 knots) and offers optimum conditions for high-quality data acquisition. Sensors are embedded within a gondola located 2m below the surface, in a highly reduced noise and bubble-free environment.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















