
Who is going to map the high seas?
Long-endurance, low-impact uncrewed systems vital to the success of Seabed 2030
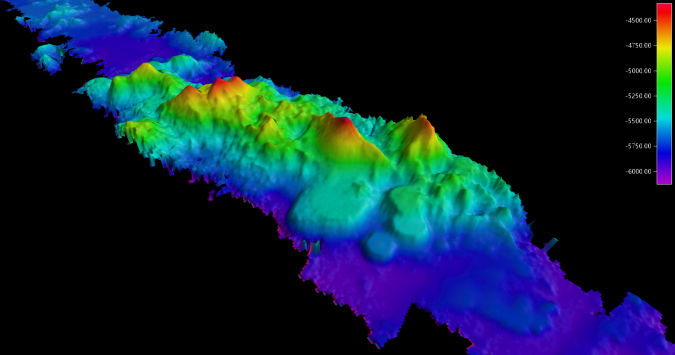
To achieve the aggressive goals of Seabed 2030, uncrewed survey systems must be used to augment more traditional ocean mapping efforts, particularly on the high seas. In addition to providing a much-needed force multiplier for surveying, these systems lower environmental impacts by using harvestable energy, eliminating personnel at sea and reducing ship-generated noise, overboard discharge and potential for pollution. Saildrone Surveyor, a 22m unmanned surface vehicle (USV), recently completed a mapping mission that traversed approximately 4,200 kilometres and mapped nearly 22,000 square kilometres (see box) of previously unmapped seafloor. Primarily powered by solar and hydro energy and propelled by wind, Saildrone Surveyor ushers in a new era of long-endurance, low-impact (LELI) USVs for ocean mapping.

Seabed 2030 and the high seas
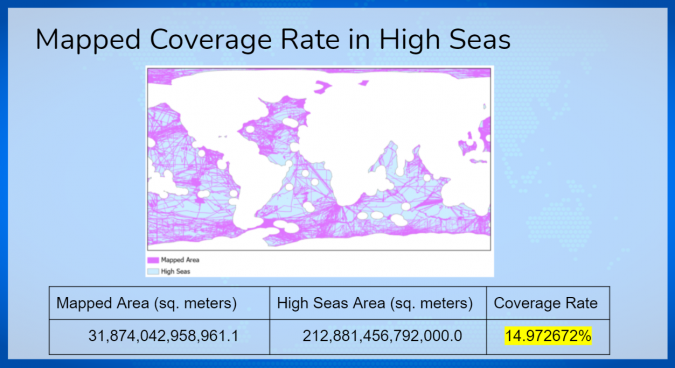
Seabed 2030 is a joint project of The Nippon Foundation and GEBCO with a goal of mapping 100% of the world’s oceans by the year 2030. As of today, only 21% of the ocean is considered mapped to modern standards.[i] Many coastal nations have instituted programmes to map their waters, focusing primarily on their Exclusive Economic Zones (EEZ). If one were to exclude these EEZs from the calculation of unmapped seafloor, the remaining high seas are less than 15% mapped (approximately 31,874,043 of 212, 881, 389 km2)[ii],[iii]. Generally, the high seas are deep, difficult to reach, and more accurately, expensive to survey with manned vessels, and there is limited incentive to map the seafloor. This will be a significant challenge for the Seabed 2030 project – how to map the deep ocean in areas of low priority to countries with limited budgets. As marine resource exploitation efforts, such as deep-sea mining, become a reality, mapping of the high seas will become a higher priority, but it is unlikely these areas will receive the necessary attention prior to 2030. Industry, government, and philanthropic organizations must be convinced to fund high seas mapping projects to achieve the goal of Seabed 2030. These high seas projects must be efficient, cost-effective, and attractive to potential funding partners by offering something unique and different to traditional survey ships. In other words, mapping of the high seas requires long endurance, low impact (LELI) survey vehicles.
What is long-endurance, low-impact?
Mission endurance for motorized USVs, whether diesel or electric, typically ranges from hours to less than two weeks. These systems often have limited power available on board, which restricts both endurance and capability of installed sensors. Many advanced USVs are outfitted with high resolution multibeam sonars for use in shallow (less than 300m) water and may require a mother ship or local team to provide necessary services and support. To address the mapping shortfall of the high seas, without using a mother ship or local support, a USV must have a deep ocean mapping sonar system and be able to transit to a remote area, survey for months at a time, and safely return to port. Saildrone Surveyor was uniquely designed for this exact mission - by sailing to and from a survey area, using solar and hydro power to charge batteries, and limiting engine use to battery charging unless absolutely necessary, Surveyor can remain on station for upwards of six months before returning to port. A traditional survey ship would very likely need to return to port multiple times for fuel, replenishment, and crew swap, losing valuable survey days to transit.
In addition, USVs emit very little or zero CO2 when compared to a survey ship. This makes the overall carbon footprint of Surveyor and other USVs extremely small, hence the “low impact” adjective. This advantage is being recognized and, primarily to reduce the effects of CO2 on our climate, is often seen as a contract requirement to use carbon friendly methods in survey operations. But low impact is more than just about carbon – USVs significantly reduce impact to the environment by simply being uncrewed and quiet. Crewed vessels not only use tremendous amounts of fuel for propulsion and power generation, but they also must provide hotel services, such as food storage and preparation equipment, bathing facilities, and air conditioning for the people on board. Overboard discharge of pollutants and fuel is always a possibility, especially because of a collision or grounding. While USVs are not excluded from the risk of accidents, there is not a significant amount of fuel or pollutants on board. Finally, ships are very noisy despite efforts to reduce machinery and propeller noise projected into the ocean. Specific impacts of ship-generated noise on ocean inhabitants, especially marine mammals, continues to be the focus of significant research, especially as ships have become the most ubiquitous and pervasive source of anthropogenic noise in the oceans.[iv] USVs, especially the Surveyor, are incredibly quiet during operations, which is good for the environment and even better for collecting sonar data.
LELI operations with Saildrone Surveyor
The challenges of high seas surveying outlined above have been mitigated by the Saildrone Surveyor, a USV capable of harnessing renewable energy to transit to remote areas of the ocean and survey for months at a time. For any USV, the main components for success are the availability of power, robust communications, and precise, safe navigation. Surveyor uses both solar and hydro generated power to charge the battery banks on board; a small diesel engine is also available for additional power generation and propulsion, if needed. Although much larger than Saildrone’s original Explorer (7m) class USV, Surveyor retains the unique rigid wing design that enables efficient propulsion from the wind with minimal electric power required. However, Surveyor’s modern multibeam sonar systems, the Kongsberg EM 304 and EM 2040, require significant, sustained electrical power to operate properly, as does the onboard computer stack, a Kongsberg Seapath positioning system, a winch with attached Sound Velocity Profiler, and a host of other atmospheric and oceanographic sensors. In addition, Surveyor is an extremely capable survey platform from nearshore to the deep ocean, but, like all large USVs, it does require satellite communication and navigation systems. The hardware and software for ocean mapping is currently no different from that aboard a ship, which means a surveyor must be on watch to monitor operations, conduct SVP casts, and troubleshoot any problems that might arise. Communication via the Iridium Certus service allows global coverage and sufficient bandwidth for this remote monitoring and limited onboard operations. Survey data is currently not offloaded until return to port; only coverage maps, health and status messages, and quality control information are pushed ashore. Onboard data processing is utilized to prepare the data prior to offload and limit the time required to deliver final products. In the future, higher bandwidth satellite communications combined with direct to cloud services should allow for near real-time offload of survey data. Surveyor’s navigation systems, including surface radar, automated identification system (AIS), and a high-resolution camera array add increased power requirements but are necessary components to ensure safe navigation during transit and while on mission. A Surveyor pilot, operating from Saildrone headquarters or other remote operations centre, provides vigilant oversight of operations, aided by a virtual bridge and a sophisticated set of alerting algorithms to provide timely images and reports of close contacts, engine performance, and communications status.
Capability and capacity for ocean mapping
Seabed 2030 estimates that mapping our deep oceans could take as long as 350 ship years and cost over US$3 billioni. As demonstrated by the successful ocean mapping transit of Saildrone Surveyor from San Francisco to Honolulu, LELI USVs offer a substantial and much needed increase in our ability to successfully achieve the goal of Seabed 2030, especially on the high seas.

San Francisco-Honolulu Challenge
In June 2021, the uncrewed, autonomous Saildrone Surveyor arrived in Hawaii after a groundbreaking maiden voyage from San Francisco to Honolulu. While ocean crossings are nothing new for Saildrone’s autonomous surface vehicles, the Saildrone Surveyor is a new, much larger class of vehicle that is optimized for deep-ocean mapping. During the 28-day voyage, the Saildrone Surveyor sailed 2,250 nautical miles and mapped 6,400 square nautical miles of seafloor.
Measuring 72 feet long (22m) and weighing 14 tons, the Saildrone Surveyor carries a sophisticated array of acoustic instruments that is normally only carried by large, manned survey ships. The Surveyor’s sensors interrogate the water column, looking at underwater ecosystems and mapping the seafloor in high resolution to a depth of 23,000 feet (7,000m).
Multibeam data from the Saildrone Surveyor has been calibrated and assessed by an external team from the University of New Hampshire (UNH), which normally calibrates large government survey vessels. “The data quality from the Surveyor is of very high quality; as good as anything we have seen from a ship,” said Larry Mayer, director of the UNH Center for Coastal and Ocean Mapping (CCOM). “Due to the wind-powered nature of the vehicle, it is very quiet, and this enables the very accurate acoustic measurements needed to map to these depths.”
“This successful maiden voyage marks a revolution in our ability to understand our planet,” said Richard Jenkins, Saildrone founder and CEO. “We have solved the challenge of reliable long-range, large-payload remote maritime operations. Offshore surveying can now be accomplished without a large ship and crew; this completely changes operational economics for our customers. Based on this achievement, I am excited to apply Saildrone Surveyor technology to other markets normally reserved for large ships, such as homeland security and defence applications. The implications of a low-carbon solution to these critical maritime missions are significant.”
[i] https://seabed2030.org/
[ii] Flanders Marine Institute (2020). Maritime Boundaries Geodatabase: High Seas, version 1. Available online at https://www.marineregions.org/. https://doi.org/10.14284/418
[iii] Calculation provided by Esri, personal correspondence
[iv] Erbe C, Marley SA, Schoeman RP, Smith JN, Trigg LE and Embling CB (2019) The Effects of Ship Noise on Marine Mammals—A Review. Front. Mar. Sci. 6:606. doi: 10.3389/fmars.2019.00606

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















