
Who will benefit from the Galileo High Accuracy Service?
New signal scheduled to become fully operational in 2024
On 24 January 2023, the European Union declared the Galileo High Accuracy Service (HAS) operational for testing, and it is scheduled to become fully operational in 2024. This free signal adds precise point positioning (PPP) options to capable receivers. HAS is being presented as an alternative to the current commercial offerings, so what can we expect from this new signal?
The EU regards HAS as an alternative to current GNSS augmentation services such as RTK and PPP from commercial providers. The Galileo HAS should aid various target markets and applications, including geomatics, aviation/drones and maritime, as well as autonomous driving and precision agriculture.
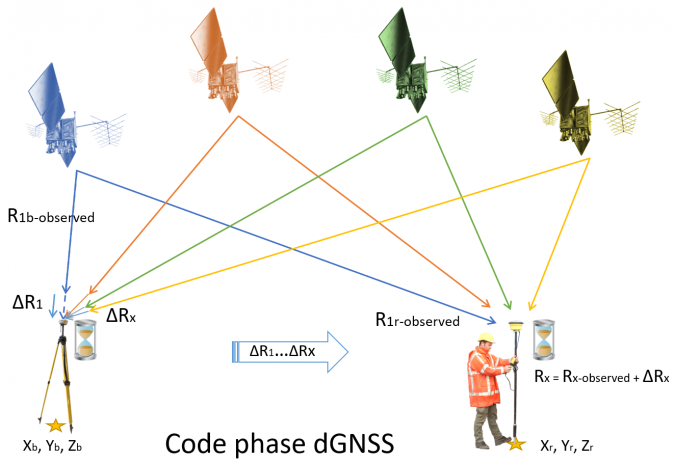
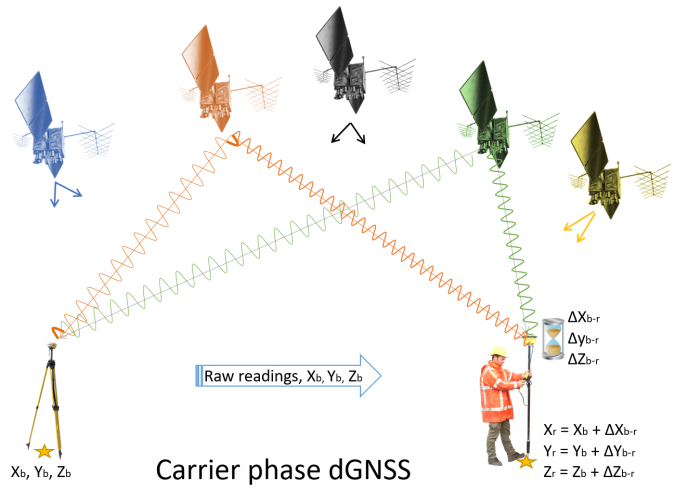
Code phase and carrier phase differential GNSS augmentation
Code phase differential GNSS augmentation is a technique by which range corrections to the coded ranging signals are computed at base stations. The correction is the difference between the theoretical range between the station and a satellite, and the range as measured by the station. These corrections, which used to be mainly transmitted using terrestrial radio stations, are now usually transmitted to the user using satellites (SBAS). The system provides an absolute position with a service area of up to thousands of square kilometres. Accuracies depend on the service, but range from a few decimetres to a few metres horizontally. Vertical accuracy is generally poor and in the order of metres. Free SBAS using systems such as EGNOS and WAAS comes as standard in every modern receiver.
Carrier phase differential GNSS augmentation covers RTK and classic static GNSS methods. In this situation, a baseline difference is computed between a base and a rover. Rather than using the coded range signals, the final positions depend on the phase of the carrier wave from a satellite. Because carrier phase systems only compute a position difference between base and rover, they are relative systems. The final position is established by adding the base location to that difference. The system has a horizontal and vertical accuracy of a few centimetres, with a range of around 15–25 kilometres for most real-time applications.
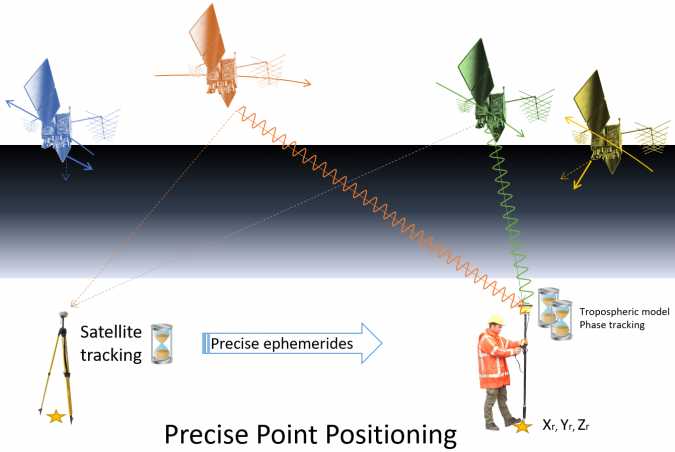
PPP as an augmentation technique
The Galileo High Accuracy Service uses an augmentation technique called precise point positioning (PPP), which has been around for a few decades but has become an increasingly important technique over the past decade or so. In PPP, just as with other augmentation techniques such as code phase differential GNSS (e.g. SBAS) and carrier phase differential GNSS (e.g. RTK), a series of corrections from a base station is required. However, rather than provide or compute corrections to the ranges, PPP takes a different approach. In PPP, the base stations function as monitor stations, computing highly accurate ephemerides in near real time. It is these highly accurate ephemerides, rather than the predicted ephemerides as received from the satellites, that are then transmitted to and applied at the user’s receiver.
On top of the more accurate orbit and clock information, the technique uses accurate error models for determining the tropospheric variations. Finally, the algorithm uses both the ranging signals and the carrier phase observations to increase the accuracy of the position determination. With this information, the receiver computes not only the receiver coordinates but also the tropospheric delay and the phase ambiguities, similar to RTK. As a result, the overall horizontal and vertical position is accurate to within approximately a decimetre. Based on the author’s own recent evaluation of PPP signals, this technique is roughly two to three times less accurate than RTK under similar circumstances. The biggest disadvantage of PPP is the long computation times required to achieve the intended accuracy, with convergence times of up to half an hour depending on the situation.
Disadvantage of commercial PPP
The ephemerides required for PPP are either downloaded from a global network (usually with post-processing) or broadcast from communication satellites. When it comes to global real-time applications, only commercial signals have been available up to now (with the exception of the QZSS CLAS signal over Asia). Several servers provide free data, but this is used for post-processing or near-real-time applications. A big disadvantage of commercial PPP so far has been vendor lock-in, since each augmentation supplier uses its own correction format and receiver manufacturers generally only support one or sometimes two formats effectively.
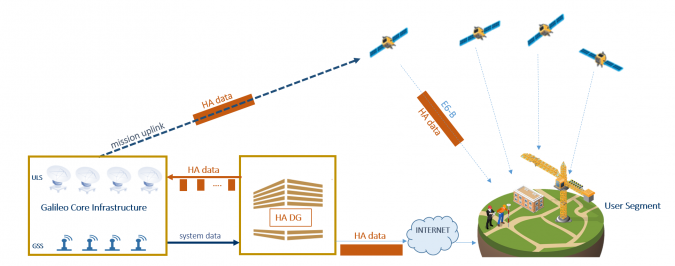
How does the Galileo HAS differ from other PPP services?
The Galileo HAS works largely like any commercial PPP service, but with some major differences. The first is that the signal is available freely over the internet or directly through the Galileo E6-B signal. This means that if one or more Galileo satellites are in view and the user has a suitable receiver, the signals can be obtained without requiring a further (paid) licence or a special signal receiver. Because the corrections are transmitted from the Galileo satellite rather than from a geostationary communication satellite, it is much easier to receive the corrections in areas such as urban canyons. Unfortunately, it seems that only a limited number of receivers have implemented the Galileo HAS so far. Hopefully, this should improve now that the Galileo HAS is declared ready for testing, with a realistic view to full operational capability in the near future.
Besides Galileo information, the Galileo HAS also transmits GPS information. Unfortunately, albeit unsurprisingly, Glonass and Beidou are not available, which reduces any multi-constellation receiver to a dual-constellation receiver. From a user perspective, this is a disadvantage, as especially Beidou satellites have a strong presence over Asia. The service is also not formally available over most of Asia and the Pacific (90°E-125°W from 60°S-60°N). Although not explicitly stated by the EU, the area without formal service (although corrections can still be received) coincides with the service area of QZSS, which operates its own, even more accurate, RTK/PPP service called the Centimeter Level Accuracy Service (CLAS).
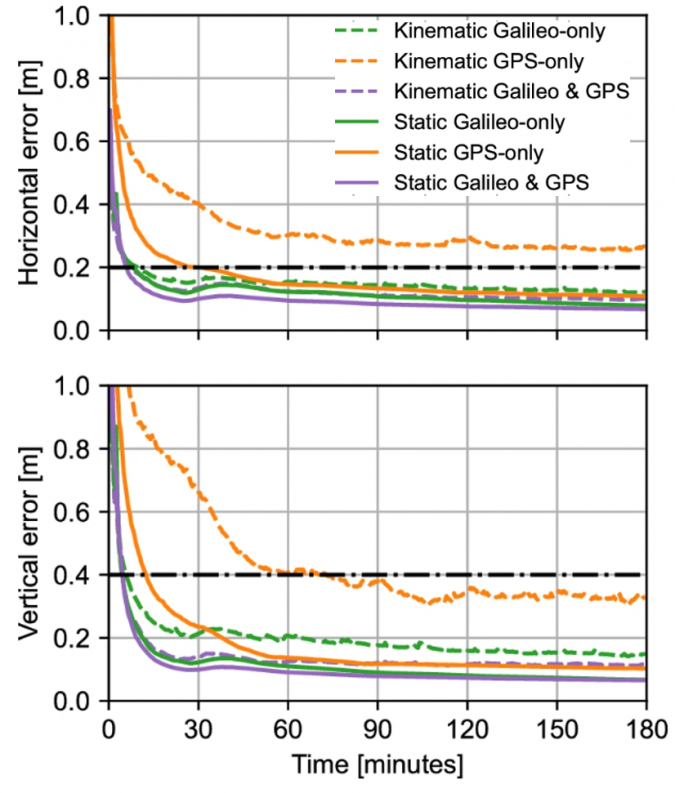
Whereas many PPP solutions require at least 15 minutes for convergence, the Galileo HAS states a typical convergence time of less than 300 seconds for Service Level 1. At Service Level 2, this decreases to 100 seconds. Initial results show that the current convergence times to the ‘Service Level’ accuracies is indeed around 300 seconds for Galileo-only and combined Galileo/GPS solutions. In early tests for GPS-only solutions, the initialization time increased to around half an hour, with results worsening for moving GNSS receivers.
What about accuracy?
The accuracy for both service levels is stated as less than 20cm horizontally and less than 40cm vertically (95% confidence level). However, let us address the elephant in the Galileo HAS room: the stated accuracies are reasonable for horizontal accuracy, but not accurate enough vertically for most stated applications in the geospatial market. Moreover, these accuracies are not yet fully achieved. Early results using both GPS and Galileo constellations show an accuracy of less than 30cm horizontally and less than 40cm vertically (95% confidence level), with a current availability of over 90% (which should increase to 99% upon full operability).
Initial tests show that the Galileo HAS can achieve much better accuracies when taking into account a convergence time of around half an hour and using both GPS and Galileo corrections. In practice, this has achieved vertical accuracies of between 10 and 20cm (95% confidence). In comparison, Fugro Marinestar G2+, a commercial PPP solution using GPS and Glonass corrections, achieved vertical accuracies of between 3cm and 10cm (95% confidence), with an annual global average of around 6cm.
Assuming that, from a commercial-political perspective, the EU intends to stay relatively close to the stated accuracies rather than the achievable accuracies, the Galileo HAS is unlikely to be used much for the intended applications of coastal and inland hydrographic surveys and (vertical) drone positioning. For hydrographic and drone surveys, the proposed service levels are not nearly good enough and RTK or commercial PPP solutions will continue to be used. In construction and precision agriculture, the accuracy is only good enough for certain applications, and RTK will probably continue to be used for machine control for quite some time.
With a horizontal accuracy that is much more in line with achievable PPP accuracies, the Galileo HAS does have a future in some GIS/mapping applications as a replacement for SBAS, giving higher accuracy and a better signal in otherwise ‘denied’ areas such as urban canyons. Moreover, the system may be useful in developing nations in cadastral surveys and to improve horizontal navigation of drones. Additionally, it could be useful in offshore construction and dynamic positioning applications, provided that operators are willing to take the risk of a ‘free’ signal without further assurances. However, the major application of the Galileo HAS is probably in autonomous driving, where it will provide a much more accurate position and – even more importantly – more stable correction signal. This will aid in the more accurate navigation of autonomous vehicles at a global level.


Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















