3D Sonar in Object Detection
Intuitive real-time imaging for sub-sea visualisation and classification
Sonar is well accepted as an option for detection and visualisation of underwater objects. Side-scan and sector-scanning sonar have traditionally been used by surveyors but whilst they produce excellent images, these are often difficult to interpret accurately. This article describes new developments in 3D-sonar and their advantages and use in emerging underwater disciplines.
Classic applications for object-detection are many and varied, ranging from looking for items such as wreckage, debris, lost items and so forth to defence applications, seeking out threats such as mines. Increasingly, though, object detection has been expanded to include obstacle avoidance for both surface and submersible vehicles, and an expanded defence and security requirement to search out additional threats from mines and explosives in and around ports, harbours and marine installations. Despite technological advances in imaging and mapping, when it comes to object detection in water the humble sonar remains a vital tool and is used almost exclusively for imaging and mapping of the seabed or structures such as harbour walls, platforms and pipelines.
New Developments in 3D-sonar and Object Detection
When we refer to 'object detection' in this instance, what we really mean is finding specific targets, usually lost against the seabed or amongst structures. In reality, all sonar detect objects; indeed, the only thing sonar does is tell you that something (i.e. an object) is present. In general, as far as imaging and mapping sonar is concerned a lack of anything in the water will result in no data, or at best a uniform, featureless image.
Existing Sonar Techniques
Notwithstanding laser scanning, which can achieve extremely high-quality results but only at short range, sonar is the only practical option for underwater visualisation. The problem with sonar is that it is not easy to understand or interpret and therefore object detection requires a high degree of skill, experience and plenty of luck. For many years, side-scan sonar and sector-scan sonar have been the mainstay of imaging and object detection.
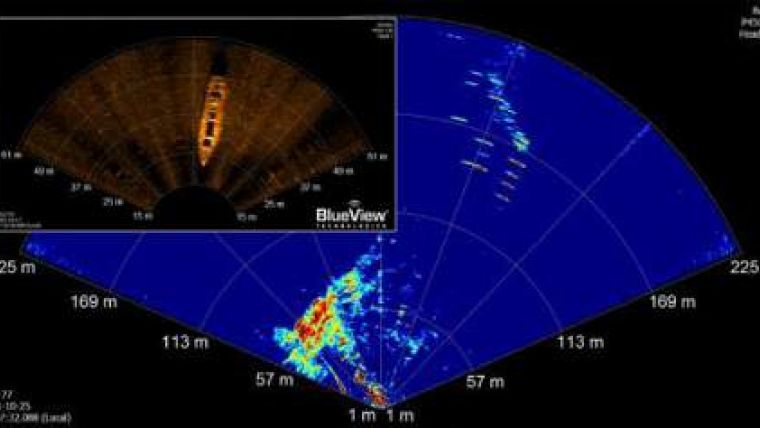
Classic images seen in publications and marketing literature show stunning images of shipwrecks and the like; however, less obvious objects return more cryptic sonar results. Side-scan and sector-scan sonar has been likened to shining a torch in the dark; it is possible 'see' what is obvious and directly ahead, but obtaining good coverage, sufficient to make a detailed analysis and interpretation, is a tough challenge. Often a significant proportion of the information available to the interpreter lies in what cannot be seen, i.e. the shadows. Skilled sonar operators and geophysicists are able to make accurate and useful analyses, but even the most experienced interpreter working with the best data can make mistakes.
The following slightly anecdotal example illustrates just how difficult it can be to interpret sonar data, and equally how easy it is to make a mistake. One particular case of the many wrongly interpreted sonar images surrounds the location of a wrecked steam liner in the Indian Ocean. Using the latest side-scan sonar and employing the most fastidious survey techniques, a highly regarded surveyor produced incomparable images of the wreck to compare against photographs and drawings of the liner. It was possible to match practically every feature on the sonar data to parts of the ship and to draw the reasonable conclusion that the lost liner had been found. In most cases the story would have ended there, unchallenged or corroborated, everyone involved none the wiser. However, in this instance, manned submersibles and TV film crews were deployed to further investigate the wreck. On reaching the site it was immediately clear that it was not the wreck it was first thought to be, but in fact a similar vessel used as a Second World War tank carrier. On reviewing the data to determine how this mistake had been made it was noticed that one feature of the steam liner, a stairway on the stern, did not exist on the WWII tank carrier, although it showed clearly on the sonar images. Further investigation showed that the tracks of an overturned tank appeared at almost the exact spot where the phantom staircase had apparently been detected.
Automated Sonar Object Detection
Since the advent of digital signal processing there have been many attempts to automate the object-detection process but few if any have proved reliable; they give variable results and are not widely used. The primary problem is the variability of sonar data as a result of height above the target, direction of survey and so forth. Consequently, like many similar tasks, object identification is best performed with the human eye. New and better imaging techniques need therefore to be provided from which to make more accurate analysis, at least until automated object detection and classification becomes a reality.
3D Sonar as Alternative to Multi-beam and Scanning Sonar
Originally developed for the sub-sea construction industry to aid tasks such as well-head intervention and welding where semi-automated control systems need precise information about the immediate environment, updated in real time, 3D-sonar is a relatively new sonar implementation. Developed over the past ten years but only recently become commercially available, 3D-sonar, as the name implies, generates 3D images. Unlike conventional sonar such as multi-beam and scanning sonar, which can generate 3D images by scanning and combining data, usually as a post-process, true 3D-sonar creates 3D data instantaneously and in real time. A 3D-sonar image is created by simultaneously forming acoustic beams to fill a 3D volume, as opposed to a narrow fan of beams. In the case of the Coda Echoscope, one of the only commercially available 3D-sonar, over 16,000 beams are formed, each yielding a data point or voxel (3D pixel) with a position (X,Y,Z) and intensity (i).
In simple terms, a 3D-sonar can be thought of as 128 conventional multi-beam sonar bolted and squeezed together to produce 128 x 128 beams at the same time. By plotting the data points on a screen in much the same way as 3D games, a 3D rendition of the underwater scene is produced. Because the data is three-dimensional it can also be moved and rotated to change the perspective for better visualisation and interpretation. The advantages of 3D-sonar over conventional 2D-sonar are several:
- each individual 'ping' yields a complete image without the need for scanning, motion compensation or post-processing
- by scanning and combining multiple pings, much higher coverage is achieved, including a high degree of additional in-fill from non-orthogonal angles
- stationary 3D-sonar can be used to visualise a moving scene.
Driven by the demands of the defence and security industries in response to heightened threat of terrorist attack, 3D-sonar has been identified and further developed as a tool for a wide range of applications where effective object detection within a difficult environment has become a critical requirement. Similarly, in the commercial world 3D-sonar is able to provide vital real-time 3D visualisation of complex scenes, such as those experienced in recent post-hurricane clean-up operations in the Gulf of Mexico. As AUVs evolve and become a practical proposition for both commercial and defence applications, reliable obstacle avoidance in increasingly difficult environments will require the more sophisticated visualisation possible only with 3D-sonar.
Maritime Security with 3D-Sonar
Whilst it is likely that conventional sonar would be used to provided a base-line survey against which to check for new objects, conventional commercial survey is not concerned with the dark nooks and crannies where sonar struggles to reach and vessels are unlikely to stray. For harbour security, however, looking for suspicious objects on the seabed or harbour wall, it is crucial to be able to search the darker corners and to do this very quickly and on a regular basis. With 3D-sonar and its inherent ability to capture a scene in a single ping it becomes possible to approach the task very differently. By simply 'pointing' the 3D-sonar into the areas of concern, almost like a searchlight, it is possible to capture the scene without needing to perform complex scanning manoeuvres. Unlike a searchlight, the resultant images will be in full 3D, allowing detailed onsite analysis. When combined with subsequent and adjacent pings, a wide-area harbour scan can be completed very quickly, analysed in the field and post-processed for more detailed analysis and interpretation.
When performing large-area scans, such as along harbour walls, 3D-sonar offers the advantage of giving extended coverage in hard-to-access areas such as under piers and among pilings and similar structures. In short, 3D-sonar is simultaneously able to view 25 degrees ahead and 25 degrees behind, to 'see' into the shadows otherwise impossible to survey by conventional sonar. Similarly, the large coverage achieved by a single ping allows for walls and the like to be scanned much faster, without loss of coverage.
In the absence of detailed and reliable remote imaging, such as by 3D-sonar, the only option for making a port secure is to send in divers; this is at best inefficient, probably ineffective and always dangerous. At the very least, 3D-sonar can aid and direct divers towards areas of real concern.
Ship Scanning with 3D-sonar and ROV
A relatively new underwater survey discipline, ship's hull scanning may be considered 'upside-down' surveying. It has all the fundamental problems associated with conventional survey but is equally ideally suited to 3D-sonar operations. Over-the-side mounted and looking upwards from a small boat or ideally mounted on a remotely operated vehicle (ROV), 3D-sonar can quickly and efficiently scan large hulls, providing a highly detailed picture of the lumps, bumps and recesses on the largest of vessels. When integrated with other harbour data this provides a continuous 3D-image of the harbour, not just the seabed.
Intruder Detection with 3D-sonar
Although not a classical object-detection problem, detecting and identifying threats in the water in and around key maritime installations has become a major concern in recent years. Short of putting up a physical barrier around a harbour it is always going to be very difficult to prevent a determined intruder gaining access to a harbour or marine installation. The second-best solution is to detect, locate and identify such threats before any damage is done. There are currently a number of technologies on the market providing long-range (500m+) scanning and detection over a wide area for harbour security, looking for divers or submersibles. Data from detected objects can be analysed and objects tracked to determine the likelihood of them being a threat.
Other technologies create what is effectively an underwater trip-wire, using acoustics whereby anything of a certain size that passes a certain point trips an alarm. The main problem with systems of this type is that they are not yet capable of discriminating accurately or reliably between divers and marine mammals (and possibly also flotsam such as logs) and therefore present a strong likelihood of regular false alarms. At best such systems generate a range, bearing and signature for the potential threat, but do not offer any intuitive method for an operator to make a judgement as to its validity.
Whilst 3D-sonar has been promoted as a primary intruder-detection system, it is not ideally suited, due to its relatively short range and inherent lack of 360º coverage. 3D-sonar is however ideal for closer inspection of already identified targets and can be quickly mobilised on fast craft to attend the location of the potential threat. Capable of up to fifteen updates or 3D frames per second, 3D-sonar can be used to visualise a moving 3D scene in real time and provide quantifiable, intuitive visual references to allow onsite interpretation and validation of the potential threat before it reaches its target.
Concluding Remarks on Use of 3D-sonar
3D-sonar in the form of Echoscope is a powerful and as yet unrivalled technology that offers a whole new range of capabilities for the underwater community. Still in its infancy, 3D-sonar is rapidly evolving into the tool of choice for many underwater operations, whilst the range of applications to which it lends itself is growing on an almost daily basis. In most cases an initial trial not only demonstrates the capabilities of the technology but opens up new trains of thought, leading users to rethink how they address many existing sub-sea tasks, whilst providing a practical solution to many previously unresolved underwater visualisation problems.
With a wide range of uses, including the relatively new arena of port and harbour security, as well as traditional defence applications such as mine counter-measures (MCM) 3D-sonar is being looked at by many defence organisations to plug a wide range of capability gaps left by traditional sonar technology. Working in partnership with academic and defence research organisations, the capabilities and applicability of 3D-sonar for object detection has been demonstrated, particularly in port-security roles.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















