Pushing subsea boundaries with hybrid AUV/ROV
A leap in underwater capabilities and efficiency
Combining AUV and ROV capabilities in a modular, hybrid unit improves functionality, while subsea docking technology expands the operational window of such a vehicle, allowing it to carry out multiple work programmes in a single deployment.
Offshore oil and gas development is characterized by complex conditions and demanding environments in which remotely operated vehicles (ROVs) have become the technology of choice for carrying out critical, subsea functions. From a vessel, a skilled ROV pilot can safely and effectively execute tasks ranging from traditional inspections to equipment installation and challenging deepwater repairs. However, as capable and reliable as ROVs are, they have some limitations.
In most applications, ROVs are tethered and operated from a vessel or platform. This ultimately limits the depth, speed and – in the case of a platform – operational area in which they can be deployed. Another consideration is the cost of the vessel, which must remain on location for the duration of the ROV project as a launch and recovery platform for the ROV and accommodation for the ROV crew.
For some tasks, such as gathering inspection data, operators have been able to cut costs by using autonomous underwater vehicles (AUVs) in place of ROVs. In these types of applications, AUVs provide a more cost-effective option because they are not tethered to an expensive vessel and can complete preplanned missions without direct control from a pilot. Operators can simply programme the AUV for a mission, deploy it and download the data for processing and analysis when the dive has been completed. Although AUVs are useful, that usefulness is hindered by the traditional single propulsor designs of an AUV versus the multi-propulsor ROVs, which precludes stopping, hovering and orbiting to more closely inspect anomalies or gather additional data when the initial data acquired are inadequate. Multiple propulsors also enable much greater manoeuvrability and an ability to handle adverse water conditions in tidal areas.
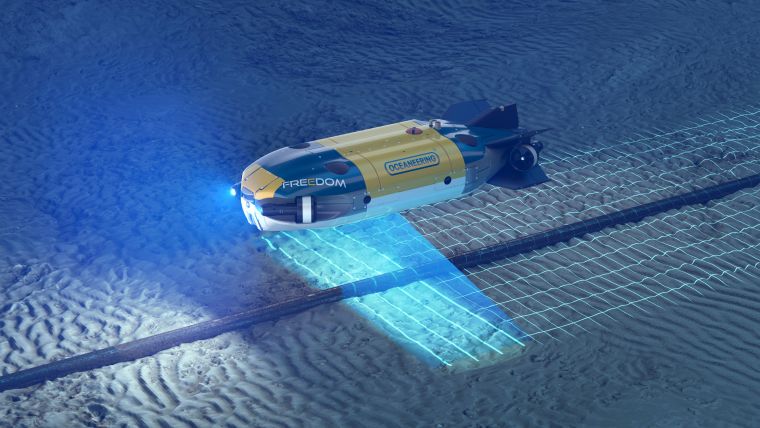
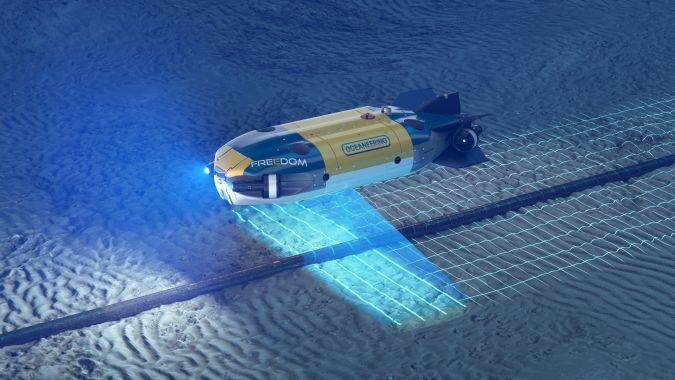
By combining brand new control hardware and accurate positioning sensors with secure, dependable communication, bespoke software and high-energy long-life batteries, the Oceaneering International development team has designed the hybrid Freedom AUV/ROV, which can receive wirelessly transmitted instructions, use advanced situational awareness to accurately position itself subsea, and collect and transmit QA/QC data to ship or shore for analysis. The vehicle has a working range of up to 120km, a depth rating of 6km, a top speed of 3m/s, and is designed with high reliability and a long service life.
The addition of a subsea docking station allows the Freedom to remain deployed for up to six months without resurfacing for maintenance. The vehicle can operate in three modes: it can be piloted remotely via a tether, it can receive through-water communication (to provide real-time control), or it can work autonomously, relying on designed-in software and hardware capabilities to complete its subsea mission. Another feature worth mentioning is its self-monitoring constraints subsystem, which allows it to determine when to break away from a mission and return to the seabed docking station for various system- and mission-defined parameters.

Designing-in flexibility
The Freedom AUV/ROV is 4.2m long, 1.5m wide, 1m high and constructed around a carbon fibre frame that houses syntactic foam wrapped in carbon fibre to deliver strength without adding unnecessary weight. The base unit comprises three modules: a core section, a forward section with thrusters, and a rear section fitted with thrusters for mobility as well as acoustics. Key to the flexibility of the hybrid unit are its modular components and standardized, system-agnostic interfaces, which enable simple plug-and-play connectivity with a range of sensors and tools.
The primary components of the Freedom AUV/ROV are connectors and cabling, an intelligent Power and Ethernet Module (iPEM), batteries, subsea computing, propulsion, sensors and lights. Using modular building blocks not only reduces the cost of construction, but decreases maintenance time, improves reliability and increases the unit’s operational life. Equally important is the fact that this forward-thinking design allows these building blocks to be usable on all future ROV and AUV systems.
This design allows the Freedom AUV/ROV to be optimized to meet diverse work scopes and requirements, including high-speed, close-proximity autonomous inspection of pipelines in a single pass, autonomous free span and crossing inspections, general visual and instrumented inspection of subsea structures (orbital), bathymetric mapping using a multibeam echosounder, high-resolution bathymetry mapping via laser, and high-resolution image mapping via a 12MP camera.
Critical components streamline operations
One of the most significant elements of the hybrid unit design is the connectors and cables, which have historically posed challenges during tool integration and launch and recovery operations. The challenge during tool integration is that the tools used by ROVs were sourced from multiple vendors, so they all had different connector configurations. The Freedom team designed this out by developing a universal plug-and-play connector system and sharing the connector requirements with vendors so that they could supply sensors designed for the interface.
System configuration for the controls and sensors was simplified by eliminating serial communications from the backbone infrastructure, which also saved money and reduced integration time. The plug-and-play distributed subsea control system is built on an iPEM configured so that additional iPEMs or plug-and-play devices can be easily connected. Designed with a minimum ten-year service life, the iPEM is lightweight, compact and designed for robustness and corrosion resistance.
An iPEM consists of multiple subcomponents that include Ethernet switching, high-voltage and low-voltage DC bus switching, bidirectional power flow control, insulation monitoring and timing signal multiplexing. iPEMs are highly modular and can be tied together to maximize reliability for the overall Ethernet communications backbone and high-voltage DC bus. The communication speed is up to 10Gbps (gigabits/second) on main trunks between iPEMs, computers and shore support equipment and 10Mbps to 1Gbps for all other devices, depending on the needed application.
Intelligent fusing switches high- and low-voltage channels using high-speed analogue protection and software-controlled fusing profiles to mimic normal fuses and protect the end devices and cables under fault conditions. The insulation between the seawater (chassis) and power lines is monitored for every port and bus. Ports can be galvanically isolated if a fault is detected, and faulted ports can be continuously monitored after isolation.
Specially designed subsea batteries enable long-term deployment of the Freedom. The batteries are designed with a high cycle life lithium chemistry to deliver the most compact and highest energy density possible and can charge and discharge several thousands of times with minimal degradation. The vehicle is fitted with battery modules comprising 36 cells in a series-parallel configuration for appropriate voltage and amperage and to provide redundancy and ample power. A battery management system uses a multi-tiered safety strategy to ensure the cells are at safe voltages and temperatures, that the batteries are not being charged or discharged too quickly, and that no critical health parameters are out of bounds. If an anomaly is identified, the cell module is isolated to protect equipment and operators.
The AUV/ROV computer housing is also designed for modularity. The base configuration is two chambers – each holding a computer and emergency electronics – comprising only two end caps and the base housing. The compact end cap is a standalone computer rated to 6,000m water depth. It is fitted with redundant seals and includes a pressure relief valve and jacking screw holes so that it can be easily disassembled from the housing for future upgrades. Intermediate caps can be stacked on either side to provide more chambers. The computers and emergency electronics are all in separate, isolated chambers, so any single chamber faults do not affect others. This construction also allows any chamber to be opened for maintenance without breaking the seals on the other chambers.
Like the other building blocks, the thruster that controls the AUV/ROV’s movement has a common modular design to ensure ease of production and consistent performance over a ten-year operational life. The thruster design relies on having a fully integrated unit with motor and drive in one housing, allowing easy maintenance and simplicity of design for long-term reliability.
Sensors are essential to the unit’s situational awareness and ability to collect accurate survey-grade data. The unit is fitted with a Sonardyne AvTrak 6 acoustic system to maintain communication between a vessel, the Freedom while subsea, and a Sonardyne SPRINT-Nav 500 inertial navigation system (INS) that provides incredibly accurate position data to the vehicle within the water column by measuring roll, pitch, heading and velocities. The position is aided by an inbuilt Doppler velocity log, and the INS is continually updated from the Sonardyne Ranger 2 ultra-short baseline system.

The vehicle also utilizes redundant Valeport BathyPacks, which provide accurate depth and altimeter data and generate precise sound velocity and water density measurements to improve the accuracy of the data from the sonar instruments. Two Norbit forward-looking sonar systems deliver horizontal and vertical scanning for obstacle avoidance capability, while a downward-facing Teledyne Reson SeaBat T20 multibeam echosounder allows the unit to perform environmental mapping, gather inspection data and detect and track pipelines. A Voyis ULS-500 laser imaging system along with downward- and forward-facing Imenco Goblin Shark HD wide-area internet protocol cameras feed into the sensor fusion system, which identifies the most suitable sensor to direct flight control for a given function.
The need for efficient high-voltage DC lighting at depth led to an LED light designed to deliver nearly 200 lumens per watt with a relatively high colour-rendering index. The LED is driven from a 400VDC bus (main batteries), which removes unnecessary step-down conversions. Light output for a single module is as high as 23,000 lumens, with dimming control down to 6% of full intensity delivered via an analogue or PWM signal.
Delivering value through innovative design
The Freedom AUV/ROV is designed for long-term, deepwater surveys. The unit’s modular design allows it to be outfitted quickly and provides a framework for enhancing the unit’s capabilities. In addition, using modular building blocks reduces the cost of construction, decreases maintenance time, improves reliability and extends the unit’s operational life. Real-world deployments have proven the unit’s functionality, and additional enhancements are underway that will expand the AUV/ROV’s capabilities, enabling it to carry out even more complex and demanding subsea tasks.
Acknowledgement
This article is based on paper OTC-32520-MS Next Generation Building Blocks of an Autonomous Subsea Vehicle, presented at the Offshore Technology Conference held in Houston, Texas, from 1–4 May, 2023. The author would like to thank SPE for permission to rewrite the technical paper for publication.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















