
Subsea autonomous navigation capabilities for small-sized underwater vehicles
Towards affordable high-end solutions to direct ROVs
Taking into account the increasing demand for autonomy in hydrography, this article examines the development of an innovative, small-sized subsea sensor fusion solution. This groundbreaking solution has the potential to automate ROV underwater monitoring and inspection tasks, at a cost of less than €10,000. This article delves into the results of the developed solution, as well as the initial validation tests to assess its performance. Furthermore, it outlines the next steps to further improve on the capability.
An increasing amount of inshore and offshore assets require inspection, repair and maintenance (IRM). Divers carry out the majority of this IRM work, but we are seeing the increased use of remotely operated underwater vehicles (ROVs) for this. The harsh conditions at sea present a high risk for divers, but also limit the effectiveness of currently available unmanned vehicle solutions.
To ensure safe and efficient autonomous task execution, autonomous underwater vehicles (AUVs) need to have sufficient knowledge of their environment, operator preferences and platform capabilities. In particular, the self-assessment of the navigation performance of AUVs is essential to ensure safe operations, especially when operating near infrastructure or other vessels. However, reliable underwater navigation solutions are either very costly or underperform in terms of providing accurate information on the position of underwater assets.
TNO has investigated and developed an innovative small-sized subsea sensor fusion solution capable of automating ROV underwater monitoring and inspection tasks with hardware costing less than €10,000. This took place within the Autonomous Underwater Remote Operations (AURO) public private partnership (PPP) project subsidized by TKI Wind op Zee (Wind at Sea). Validation tests were conducted in the Proeftuin op de Noordzee (North Sea Living Lab), a designated area for conducting experiments. This article describes the developed solution and initial validation tests to evaluate the system performance. The next steps to advance the developed capability are also outlined.
State-of-the-art subsea navigation and market trends
The performance of more affordable sensor options has increased significantly in recent years. For example, multiple manufacturers are now developing higher-end micro-electromechanical system (MEMS)-based inertial measurement units (IMUs). These MEMS systems do not match the performance of the high-end fibre-optic gyro (FOG) IMUs, but have seen major improvements, for example in bias stability. Off-the-shelf products include the Honeywell HG4900 series and VectorNav VN2xx series. Besides MEMS IMUs, multiple lower-end Doppler velocity log (DVL) options are starting to become available, for example from Waterlinked and Cerulean.
Although cheaper sensor technologies are emerging, there are currently few completely integrated ‘budget’ positioning systems available. Larger unmanned underwater vehicle (UUV) systems typically have a high-end, bulky and heavy INS with integrated positioning sensors. However, new companies have emerged in recent years offering much smaller, affordable underwater vehicles. These systems could introduce significant cost reductions for offshore operations. The aforementioned high-end positioning systems however do not fit on these smaller UUVs and are also not feasible from a cost perspective.
Finally, there is an automation trend, since piloted UUV operation is often time-consuming and challenging because of harsh environmental conditions underwater. This could be done much more effectively if the UUV could follow an inspection trajectory in an autonomous manner. To enable safe autonomy, the position uncertainty must be incorporated into the planning phase to avoid collisions and guarantee that infrastructure will not be damaged by the UUV operation.
Subsea navigation solution (software and hardware)
The aim was to develop a budget positioning solution that combines cheaper sensors with advanced sensor fusion methods. In general, the budget sensor options will have lower specifications and be more affected by varying environmental conditions. The philosophy was to use sensor fusion to estimate the sensor properties in a pre-run calibration phase and then to compensate for these effects, allowing for ‘near high-end’ performance. The following sensors were used in the sensor fusion:
- VectorNav VN200 IMU (3-axis accelerometer, 3-axis gyroscope and 3-axis magnetometer)
- BlueRobotics 30 bar pressure sensor
- Waterlinked A50 DVL
- RTK GPS using the uBlox M8P with dedicated base station (2cm precision)
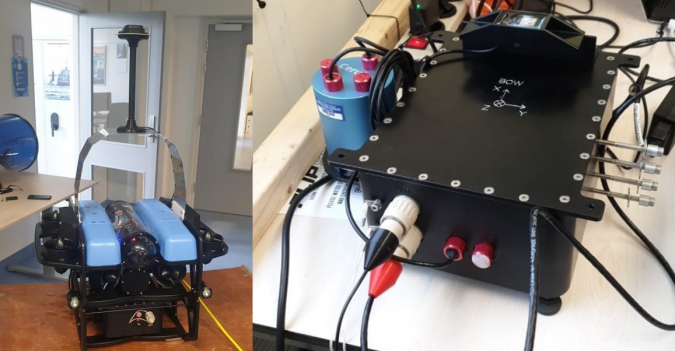
A watertight sensor box contains the hardware and is integrated under the BlueROV2 (see Figure 1).
The BlueROV2 is an affordable and small-sized ROV (45x34x25cm, 12kg) made by BlueRobotics. TNO has developed the Timing Orientation & Positioning Service (TOPS), which combines multiple state-of-the-art fusion algorithms into a single high-end fusion engine. TOPS was run in real time on the processing board integrated in the sensor box. The RTK GPS antenna was designed to stick out of the water to let the BlueROV2 be fully submerged, mimicking realistic conditions for all underwater sensors while maintaining an accurate RTK GPS signal. This makes it possible to carry out a pre-mission sailing pattern in which the RTK GPS can be used in the sensor fusion. This pre-mission sailing is essentially a calibration phase in which the fusion engine establishes estimates for sensor properties (e.g. biases and scale factors). During the experiments, it was found that a calibration phase of approximately 90 seconds was sufficient for the BlueROV2 to dive below the water surface and safely carry out its mission.
To demonstrate the performance of the positioning system, experiments were done during the mission phase with the RTK GPS antenna above the water. The RTK GPS was manually disabled for the fusion engine after the calibration, but kept available as a reference signal to assess the fusion performance. To enable a comparison between combinations of sensors, the box was self-designed to house various sensors.

Validation tests
The value of this innovation for technology integrators and end users was demonstrated using the BlueROV2 and TOPS navigation solution developed in the AURO project (software and hardware). To showcase how the navigation solution can be used to enable safe and effective operations, a simple autopilot capability was developed to enable the BlueROV2 to autonomously follow a pre-planned path in the horizontal plane (i.e. at a fixed depth). In this case, the demonstration showed a lawnmower type pattern to mimic seafloor inspection.
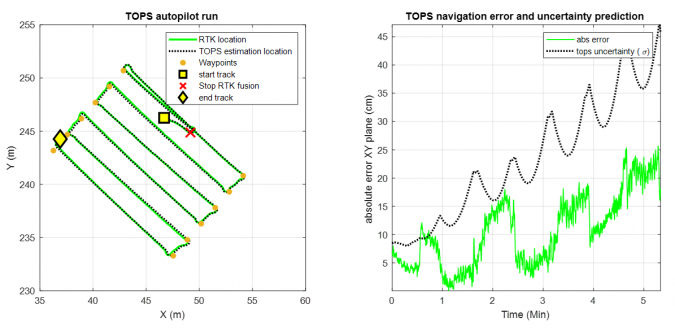
The RTK GPS was used by the TOPS fusion during the first manually controlled sailing task in the calibration phase. Afterwards, the RTK GPS was no longer used by the TOPS fusion engine and only acted as a reference to assess the TOPS performance over time. TOPS ran at 200Hz in real time and estimated both the position and the position uncertainty.
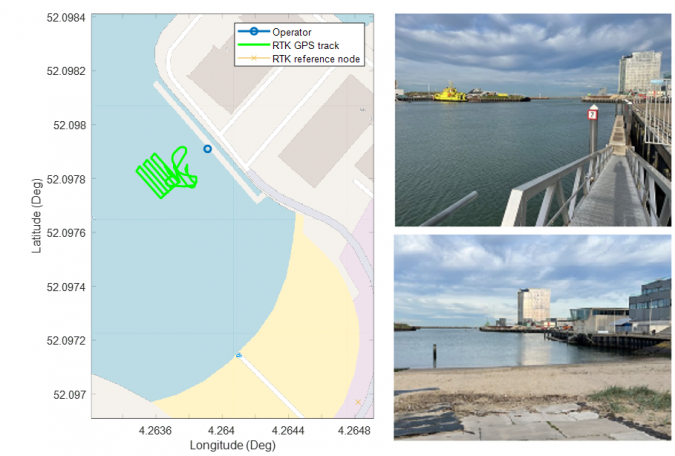
The results of the tests show an approximately 0.4% error in distance travelled. Figure 2 shows the BlueROV2 operating autonomously in Scheveningen harbour, while Figures 3 and 4 depict the test setup of the demonstration, the tracks sailed by the ROV and the error and uncertainty evaluation of the TOPS uncertainty prediction.
Conclusions and way forward
The AURO project showed that state-of-the-art sensor fusion can be used to achieve high-end navigation performance using low-end small-sized navigation sensors. This was demonstrated through various experiments in Scheveningen harbour with a self-developed sensor box integrated with a small-sized ROV (BlueROV2 from Blue Robotics). The sensor fusion was done using TOPS, which is a TNO-developed sensor fusion framework that combines multiple state-of-the-art fusion algorithms. The total hardware cost for the sensors was below €10,000, and their size and weight allow them to be integrated into all smaller vehicles currently available. The research also showed that it is possible to generate accurate estimates of the position uncertainty during operation.
Next steps should be to further validate the developed technology under different offshore conditions and by system end users, to ensure optimal teaming between the robotic platform and its operator.
Acknowledgement
This work was made possible through a TKI-WoZ PPP project conducted with the Dutch Ministry of Defence, Boskalis, RWS, Tree-C technology, IV-Infra and Aquatic Drones.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















