Real-time Validation of CoVadem Derived Water Depths
By Using Locations with a Fixated Riverbed
CoVadem has created an up-to-date depth chart of inland waterways. The underlying data obtained came from vessels participating in the CoVadem initiative, each sharing their sensor data in the CoVadem cloud-based processing environment. To make sure the underlying data is both accurate and reliable, we need a method that automatically filters out erroneous measurements. This article presents a method in which measurements are compared in real-time at locations with a fixated riverbed (e.g. not eroding or aggrading over time).
A growing fleet of roughly fifty vessels participating in the CoVadem initiative continuously measure, log and broadcast data from onboard sensors. The underkeel clearance is measured with a single beam echo sounder, the vessel position with a GPS meter, and vessel draught with a ship cargo meter (a calibrated system of pressure sensors). A video explaining the initiative in more detail can be seen below.
All collected data is then processed and combined into a chart displaying up-to-date water depths of inland waterways in a cost-effective way. Using hydrodynamic and hydrological models, we enrich the data with a forecast of the water depth. As such, it becomes possible to optimize cargo volumes and sail more efficiently (e.g. Bons et al, 2016).
With single beam transducers being typically less precise, CoVadem does not aim to determine the water depth with a precision equal to that of a multibeam echo sounder. However, the measurements are performed continuously so that the information about the riverbed is always up-to-date, including in dynamic locations or locations that are not surveyed with multibeam equipment. Even more information about the riverbed can be obtained when looking at the trends of the measurements since the latest available multibeam measurement.
Current Post-processing of Measurements
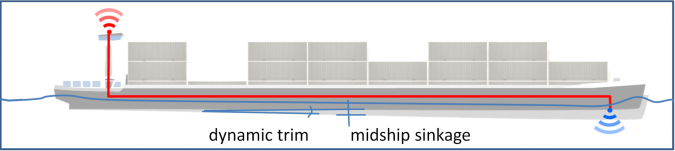
Millions of measurements a day are translated into water depths using a ship squat calculation. Squat is the increased draught due to the flow of water past the ship hull (Figure 1). The forward speed of the ship pushes the water in front ahead, which then must return at the sides and below the ship, resulting in the increased speed of the water, which, due to the Bernouilli effect induces a decreased pressure underneath the ship. This results in a water level depression in which the ship sinks (sinkage). The effect is not spread equally over the ship due to the local changes in the ship hull over its length – this can cause the ship to trim. Ship squat is the combination of sinkage and (dynamic) trim.
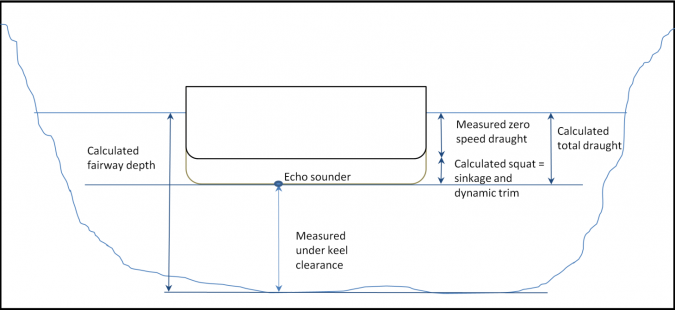
Within the CoVadem initiative, the underkeel clearance is measured at the echo sounder location with the position known by all participating vessels. Figure 2 shows that the fairway depth (water depth) at this location can be calculated by the summation of measured underkeel clearance, ship squat and initial zero speed draught.
Validation Results
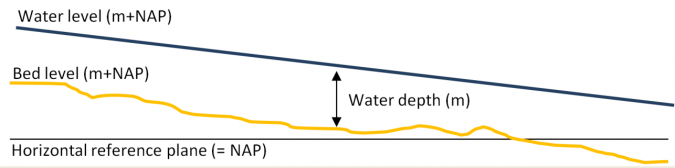
CoVadem water depth data is validated with multibeam data. To this purpose, the determined water depth should be translated to a riverbed level (Figure 3). This is done by subtracting the measured water depth from the water level of a nearby water level gauge.
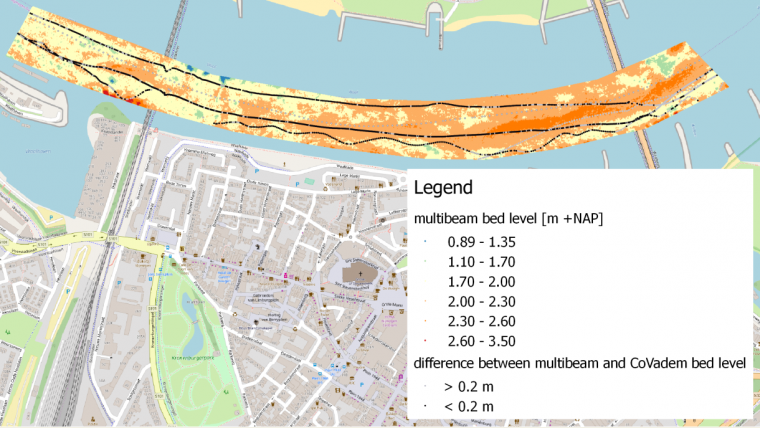
By comparing the riverbed level from CoVadem to multibeam data, we have shown that the average absolute error is around 20cm (Van der Mark et al, 2015). This validation was performed at locations for which recent multibeam measurements were available (Dutch Rhine branches Bovenrijn and Waal).
Outstanding Challenges
Sometimes, the measurements are incorrect due to problems with the equipment. A structural vertical offset can also be seen, for instance, due to equipment settings. To make sure the depth chart is created from accurate data only, we need a method that (a) automatically filters out erroneous data, and (b) corrects the data to minimize the vertical offset. Such filtering and correction algorithms should be applied continuously, as a vessel that measures correctly today, might measure incorrectly tomorrow because errors in the sensors can occur at any moment.
Proposed Real-time Validation
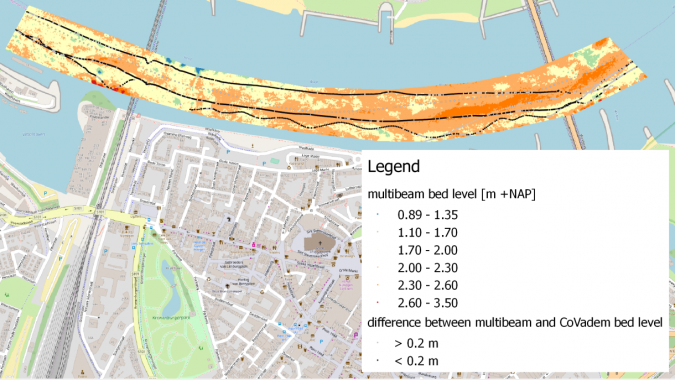
In the Netherlands, the river Waal is one of the main inland transport corridors. The river has an alluvial character, with erosion-sedimentation processes and dunes that migrate quickly over the riverbed. However, the bed level is more or less constant in time at the bends near Nijmegen and St. Andries. The riverbed has been fixated in these two bends to guarantee sufficient water depth over the entire navigation channel by creating an immobile layer of large stones. This results in the riverbed not eroding or aggrading over time at these locations. In the Netherlands, these locations are often referred to as ‘fixed layers’.
The CoVadem collected data is then compared in real-time at certain riverbed locations with a fixed layer. Officially acknowledged multibeam measurements are only performed a limited number of times a year, so only at locations with a fixed riverbed can these measurements be used for validation purposes for a longer time span.
The river bend near Nijmegen was selected as the starting location for the real-time water depth validation. Rijkswaterstaat (the maritime authority responsible for, amongst others, management and maintenance of the fairway) performs multibeam measurements of the Waal bi-annually.
Description of Method
The proposed method can be used at locations that fulfill the following requirements:
- There is a fixed layer in the riverbed
- The water level is available from a nearby water lever gauge
- The majority of the CoVadem fleet passes the location on a regular basis
Every passage of a vessel over a fixed layer is automatically categorized and selected. The water level of the passage is then looked up and after a correction for the slope of the river, the riverbed level is calculated. This calculated riverbed level is compared with the riverbed level of a multibeam measurement at the same location.
Results Obtained by this Method
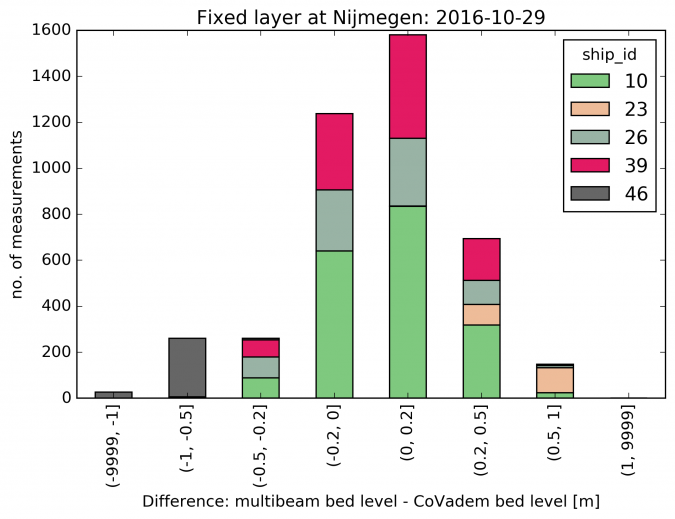
After comparison of the riverbed level at the fixed layer in the bend near Nijmegen, we are able to distinguish between vessels that produce erroneous or non-erroneous data for the current passage of the fixed layer. CoVadem aims at water depth measurements with a 20cm accuracy. Figure 4 and Figure 5 show that most measurements are within the intended accuracy.
Potential Improvements due to this Method
The presented validation method is first and foremost established to filter out erroneous measurements and applying it to the system will ensure that only accurate data is used in the following analyses.
It also enables us to further improve the ship squat calculation and the hydrodynamic model for the riverbed forecast. It becomes possible to calculate the difference in riverbed levels from CoVadem and multibeam measurements for different versions of the squat algorithm over a longer time span so that it is possible to check whether the new squat algorithm outperforms the old one before it is rolled out in the production environment.
Future Possibilities of Real-time Post-processing
This real-time validation method can be used in other locations with a fixed bed level. Possible locations include the rocky riverbed in the Upper Rhine in Germany, and in hydraulic structures, such as locks, offer the possibility of automated validation.
In the future, when the nature of the most critical erroneous measurements are understood, we will continue development towards implementation of real-time calibration of water depth measurements to correct for a structural vertical offset. This allows for the creation of more accurate depth charts without having to perform expensive calibrations onboard of the individual participating vessels.
References
Bons A., Wirdum M. (2016). Big Data and (inland) shipping: a sensible contribution to a strong future, COMPIT 2016.
Van der Mark C.F., Vijverberg T., Ottevanger W. (2015). Validation of Actual Depth Measurements by Inland Vessels, Smart Rivers 2015, Buenos Aires, Argentina.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















