USBL in Dam Survey by ROV
An USBL underwater positioning system is the ideal solution for dam survey by ROV, providing easy and fast set-up and accurate 3D measurement for traceability, but not all USBL systems can meet the demands of this environment. PLSM (France) has developed a light and polyvalent system for use in shallow water down to 300 metres. The author describes AQUA-METRE R300 and some typical results.
In France, ten-yearly dam inspection is mandatory for medium to large dams. There are about three hundred dams between the Pyrenees and Brittany. The main goal is to survey the submerged concrete wall in order to detect holes or potential cracks, and to carefully inspect the key elements of the dam: the sluice gates and water inlet. The basic method used consists of removing all the water from the dam and surveying the concrete walls visually. But since the availability of ROVs it has rapidly became clear that it would be more cost-effective and ecologically sound to do this without emptying, providing that ROV position was available and recorded simultaneously. ROV positioning is mandatory, especially when a fault in concrete is encountered and it is essential to locate this in order to evaluate the impact on the whole construction and to be able to survey this specific point several months or years later.
ROV Positioning
If video inspection by ROV has been mastered, 3D underwater metrol-
ogy-class positioning remains a nightmare for engineers in charge of survey. Radio-positioning systems are not operational in water, optical not suitable due to poor visibility (often in the range 30cm to 1m), leaving acoustic as the only option available today for this type of job. The first positioning systems used were acoustic long-baseline (LBL), and later ultra-short baseline (USBL). But these systems had been designed for offshore and military markets and mainly for ocean and medium to long-range applications. They were thus not fully suited for this particular application, where accurate 3D short-range systems able to cope with reverberation, sharp thermo-clines and huge concrete structure are expected.
System Configuration
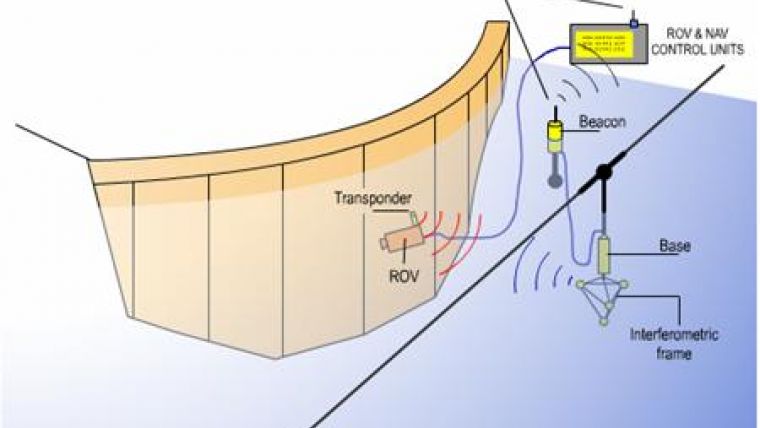
The configuration of the USBL system and the ROV consists in the first place of a survey/inspection class ROV with sufficient stability to follow concrete cracks. The ROV presented here-after is a Super Achille from Comex, owned and operated by the French company SASA.
There is a specific ROV pointer and hydrophone attached to the ROV. The transponder includes biaxial inclinometer, heading compass and metrology-class depth-gauge (total error less than 0,025% FS, including temperature variation). Heading, pitch, roll and depth may be transmitted through the ROV umbilical up to the NAV-room or reported by acoustic message by the Base. The data is used by survey AQUA-CAD software to compensate for ROV attitude/heading and produce measurement in centre of video image. Pressure depth is also used to counter ray-bending effect of thermoclines, often very sharp in dam lakes.
The third component is the USBL measurement Base, a key element the position of which must be chosen in accordance with both the geometry of the underwater building to be investigated (to avoid any masking) and USBL range. The Base is suspended in mid-water, attached to cable held taut between the banks. No tuning-level mechanism is necessary since it includes a biaxial inclinometer that enables vertical corrections of +/-15° (0.05° accuracy), so the Base gets the gravity axis as the Z-axis. A specific ‘T’-shaped frame with cardan joint provides sufficient oscillation damping. An important characteristic of the USBL is to offer sufficient coverage to avoid frequent Base relocation; the used AQUA-METRE R300 offers near-full hemisphere coverage volume. If distance permits, the Base is directly connected to the Interface Unit using a data/power cable; otherwise, a radio link buoy is used that in-cludes a Radio-Modem module (1km range, 869MHz or 915MHz licence free band). In this case the Base is fed by the buoy battery bank, which provides one-week autonomy.
The ROV & NAV-control unit includes a PC (e.g. a laptop) and special USB interface box including radio-modem, video overlay and RS485 interface to the ROV as optional link. The PC runs AQUA-CAD, software developed by PLSM to manage the system and drive an Intellicad application running on the same PC (Intellicad is a very cheap and reliable alternative to Autocad). Intellicad software is used to display the 3D drawing of the dam and real-time ROV positions and measurement. The main benefit being that most of customers know a bit of Autocad®, so that it offers a friendly GUI as well as a powerful tool to perform measure-ment on the fly (distances, angles, area, etc.) and produce a final draw-ing which is fully compatible (.dwg or .dxf).
The video overlay unit adds coordinates to the recorded ROV video; thus any object is clearly associated with a cartographic 3D coordinate. In case of any doubt, it is then possible to return to any location on the dam.
AQUA-CAD survey software manages the acoustic positioning system. It sends commands to the Base through the radio-modem, collects the measurement, transforms the local Cartesian coordinates to carto-
graphic coordinates and drives the video overlay and the Intellicad software.
Coordinates
During dam survey, or that of any other submerged building, it is mandatory to deliver coordinates in the customer’s cartographic coordinate system, which is provided automatic-ally by the software. This transform-ation is made by measuring the acous-
tic coordinates of two reference points named 'pivot' and 'lever'; these points being defined in the final coordinate system in these conditions the transformation consists only of a 3D translation followed by a rotation around the Z axis. The absolute coordinates of these two reference points must be already known and identified in the CAD drawing and directly selected by the user from the CAD software. Calibration then consists simply of moving the ROV successively to each reference point, picking up their respective positions in the CAD drawing, and waiting for acoustic measurement completion. During dam survey, for instance, the reference points are often chosen along the seal, which has to be surveyed in any case, between two concrete blocks the position of which is well known.
Results
More than twenty dams have been surveyed since 2001 in France. The following results come from the Cap de Long dam survey that took place in June 2006 in the south of France. This is a high-altitude dam, lying at 2,400m in the Pyrennees; it is about 300 metres long and 100 metres high. SASA was in charge of the ROV survey, and an expert from EDF (Electricité De France, the French electricity supplier dam operator) managed the survey. The ROV type was a Super Achille from Comex: a 100kg-class ROV well suited for video inspection. The survey lasted a full week, during which more than sixty vertical lines were inspected, leading to more than five thousand 3D coordinates being recorded and displayed in the Autocad drawing of the dam.
It is important to note that the pos-itioning system was set up and oper-ated by a single technician during the whole survey. The survey team comprised pilot, video operator, Nav/positioning operator and customer expert.
Since 2004, the system also is in use by Hydro Quebec, a major dam operator with specific requirements and constraints due to the cold winters (the system sometimes is operated under an ice layer). G-Tec used the system recently for an inspection of the Eupen Dam in Belgium.
Concluding Remarks
Dam survey application demonstrated the benefits of an accurate, lightweight and easy-to-set-up USBL system. Generating only one Base to Transponder acoustical path, the system is less sensitive to reflection than LBL, while a two-unit system (Base and Transponder) also means fast and easy deployment, particularly since it automatically performs self-calibration, including water celerity measurement, during the brief power-up sequence. This USBL configuration has already been used for other, similar, submerged building survey/inspection by ROV, such as for piers and breakwaters.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















