WERA Ocean Radar System
Features, Accuracy and Reliability
The WERA (WavE RAdar) system is a shore-based remote sensing system for monitoring ocean surface currents, waves and wind direction. This over-the-horizon oceanography radar picks up back-scattered signals from the rough ocean surface (Bragg effect) from ranges of over 200km. Results from installations all over the world demonstrate the features and flexibility of the system: high resolution monitoring (300m range cell size) over a range of 60km or long range applications with a 3km range cell size, all generated with a high temporal resolution of 10 minutes.
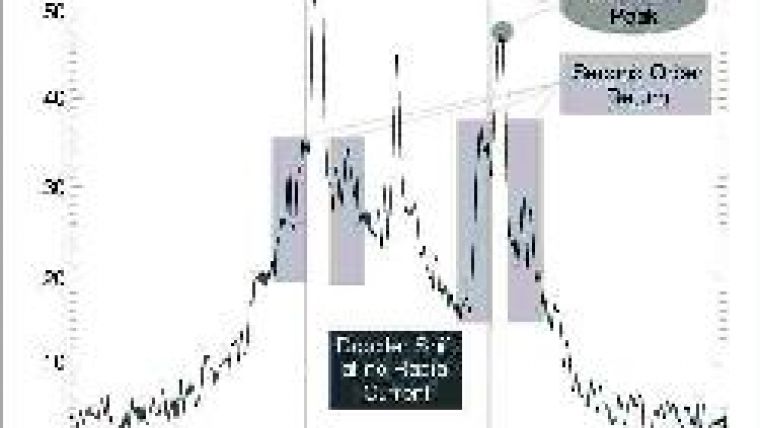
WERA operates at radio frequencies between 5 and 50MHz. A vertically polarised electromagnetic wave is coupled to the conductive ocean surface and follows the curvature of the earth. The rough ocean surface interacts with the radio wave and, due to the Bragg effect, back-scattered signals can be detected from ranges greater than 200km. The Bragg effect describes the coupling of the electromagnetic wave with the ocean wave field. Reflections from waves that fulfill this Bragg condition generate a dominant signature in the received signal spectrum due to the in-phase summation of amplitudes. The expected signature is a Doppler shifted signal with a specific Doppler shift, depending on the velocity of the relevant gravity wave (Figure 1). If the ocean surface did not move, these Doppler shifted signals would be symmetrical around the normalised centre frequency. However, the ocean current shifts these Bragg peaks; this frequency shift contains information used to calculate the velocity of the ocean current.
System Concept
The WERA system concept was developed at the University of Hamburg in Germany by Gurgel et al in 1995 and the hardware development completed in 2000 at Helzel Messtechnik GmbH. The WERA system operates in a frequency modulated continuous wave mode (FMcw). A continuously swept rf (radio frequency) signal is transmitted. The reflected signal has a frequency offset compared to the actually transmitted signal, thus the range is frequency encoded. The radar continuously transmits very low rf power: no gating or pulsing sequences are used. The required de-coupling between transmitter (Tx) and receiver (Rx) can only be achieved using separate locations for the Rx and Tx antennae. This provides the best signal to noise performance due to the extremely low noise FMcw transmission mode.
Measurement Results
Over 50 WERA systems have been installed worldwide and the resulting current and wave data validated by comparison with buoy measurements. A pair of medium range WERA systems were installed in 2005 on the Atlantic coast near Brest (France) and operated by ACTIMAR for SHOM. Buoys were placed within the field of view of the radar for validation. The correlation between the Acoustic Doppler Current Profiler (ADCP) data and WERA data was excellent: better than 0.9 for currents and 0.88 for significant wave height. (Figure 2)(Figure 3) Current measurements were integrated over 12 minutes; wave measurement data are typically averaged over a longer period (at least 20 minutes) to achieve the required measurement accuracy.
(Figure 4) The wave information is derived from the second order side bands around the Bragg peaks. These side bands have a much lower amplitude and the range for wave measurements are therefore typically reduced to about 50% compared with current measurements. (Figure 5).
Boundary Conditions
A number of physical, oceanographic and technical parameters need to be considered when defining the optimal site geometry and system configuration for a specific application. From the user's point of view, the main aspects are radar range, resolution, accuracy, field of view and site geometry. Radar range (Figure 6) depends on operating frequency. Decreasing the frequency increases the range, but also the sensitivity to external interference. At lower frequencies, short wave reflections at the ionosphere lead to increased background noise from far distances. This can lead to a high variance in range from day to night. The operating bandwidth determines the range resolution (range cell depth), for example 3km at 50kHz or 300m at 500kHz.
The range also depends on salinity: a lower salinity will strongly reduce the range. The accuracy of ocean current velocity depends on operating frequency and averaging time. The resulting Doppler shift for given velocity decreases with decreasing frequency and the Bragg resonant wavelength increases. The phase velocity (vB) of the ocean wave that fulfils the Bragg conditions depends on the wavelength. This phase velocity causes the Doppler shift observed. Since this small frequency offset contains the ocean current information, the measurement accuracy for ocean current velocity depends on the frequency measurement, and this is determined by the integration time. The field of view of a linear array is limited to ±60° and the array needs to be installed almost parallel to the coast line.
The alternative direction finding configuration does not have this limitation but delivers data of reduced quality. The reliability of this shore-based remote ocean sensing technique is very high, with 98% data availability, as reported from a deployment in France. The customer spatial coverage requirements and the results achieved in September 2007 are presented in Figure 7.
A typical antenna installation is displayed in Figure 8: a linear array configuration for 16MHz with a range of about 100km.
Conclusion
The shore-based radar system WERA is a powerful oceanographic instrument giving reliable information about large ocean areas. Its flexibility makes it attractive for scientific experiments, as well as for permanent installations for applications such as search and rescue or vessel traffic services. Though easy to install, it is not a ‘plug and play' system. For all applications, it is very important that specific local boundary conditions are taken into account.
Further Reading
Cochin, V et al., May 2006. SURLITOP experiment in West Brittany: Results and validation. Proceedings of Radiowave Oceanography Workshop (ROW-6), Hamburg, Germany.
Gurgel, K.-W. et al., August 1999. Wellen Radar (WERA), a new ground-wave based HF radar for ocean remote sensing, Coastal Engineering Vol. 37, NOS. 3-4, ISSN 0378-3839, pp. 219-234.
Gurgel, K.-W. et al, October 2006. An Empirical Method to Derive Ocean Waves from Second-Order Bragg Scattering - Prospects and Limitations, IEEE Journal of Oceanic Engineering, Vol. 31, no. 4, pp. 804-811.
Shay, L. K. et al., In Press. Relationship between oceanic energy fluxes and surface winds during tropical cyclone passage (Chapter 5). Atmosphere-Ocean Interactions II, Advances in Fluid Mechanics. Ed. W. Perrie, WIT Press, Southampton, UK. 31pp.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















