Marine habitat maps from hydrography and machine learning
The great benefits of the advancement of uncrewed and autonomous technology
Aside from being able to monitor water depths, the most recent multibeam echosounder sonar (MBES) systems can also simultaneously record the reflected intensities from different seafloor surfaces. With this capability, it is feasible to explore the variety of seabed types and afterwards build a map of marine habitats. This case study illustrates how hydrographic data was used to create a map of the marine ecosystem in Malaysia’s Redang Marine Park.
Technique to produce marine habitat map using hydroacoustic data
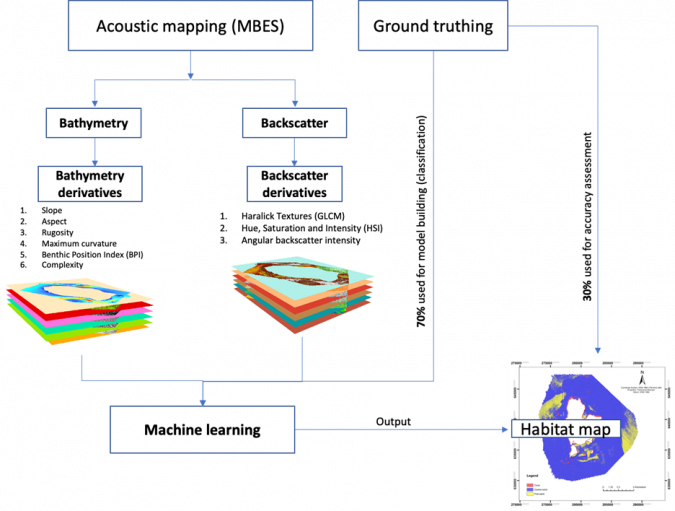
A map of any marine ecosystem can be created utilizing data about the habitat that has been acquired in the field, such as by grab sampling, underwater video observations or diving activities. These maps, however, are point-based and have little value when only sampling data is used. High-resolution spatial data such as an MBES survey bathymetry map can be used to get around this. The advantage of the hydroacoustic data from hydrographic surveys is that it is gathered remotely from the survey vessel, offering nearly 100% coverage and better spatial resolution. However, marine habitats cannot be inferred based solely on the hydrographic data. Previous studies discovered a considerable correlation between marine ecosystems and the topography of the seafloor, including its complexity or ruggedness as well as the many types of seafloor sediments and their textures. By further analysing the bathymetry and backscatter from MBES to represent habitat variabilities, these variabilities are explained. Deriving seascape derivatives from bathymetry, such as bathymetry slope, rugosity, complexity and benthic position index, as well as sediment textures and attributes from the backscatter data, are examples of this (i.e. grey level textures, grain size and sediment class). These datasets, along with sample data, are combined with machine learning techniques to provide a map of the marine ecosystem that is spatially explicit and can be used to develop a specialized model for prediction (Figure 1).
Hydrographic survey and sampling data
To gather hydroacoustic data for this study, a partnership between Universiti Teknologi Malaysia (UTM) and the National Hydrographic Centre (NHC) was established. This survey could be utilized for regular NHC tasks such as charting and adding to their bathymetry databases in addition to providing data for mapping marine habitats. A Kongsberg EM2040C MBES system was used to accomplish the MBES survey. The survey was conducted in accordance with International Hydrographic Organization (IHO) specifications, which include patch test calibration, tracking tidal fluctuations and recording changes in sound velocity during the survey. The final bathymetry map was created at one metre resolution after raw depth data was processed using Caris Hips and Sips software. Additional factors, such as seascape derivatives, were created from the bathymetry to explain the variance in seafloor topography, which is crucial for relating to marine habitats. The backscatter mosaic (or image) and backscatter intensity as a function of incidence angle (angular dependence of backscatter) were produced using Fledermaus Geocoder Toolbox (FMGT) software after the raw intensity data was processed. Using the grey level co-occurrence matrices (image texture analysis) and the image enhancement approach (hue, saturation and intensity), a variety of backscatter textures were created from the backscatter mosaic. The angular range analysis (ARA) method was utilized to generate (1) sediment types and (2) sediment grain size (phi) information.
Marine habitat mapping using machine learning
To produce full coverage habitat information, sampling data alone might not be practical. Machine learning is one method for accomplishing the goal of predicting habitat class when direct ground truth is not available. The link between the hydroacoustic dataset and the ground truth is first employed in machine learning to develop a model (including the seascape derivatives). The model must have enough data to differentiate between different classes of maritime ecosystems; in other words, each kind of maritime ecosystem has its own acoustic signature. The machine learning algorithm then identifies habitat categories based on hydroacoustic data in the absence of direct ground truth by applying this relationship (model). Depending on the survey data generated by the MBES mapping, the outcome is a spatially explicit habitat map covering the entire region. Some ground truths were reserved for map evaluation in order to validate this map.
Results of marine habitat map
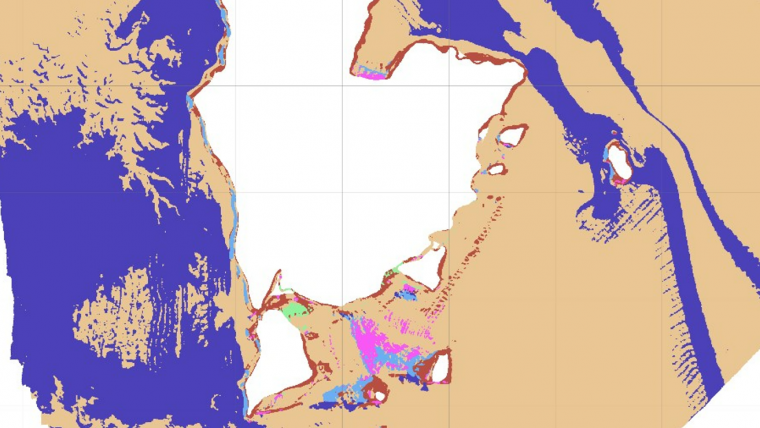
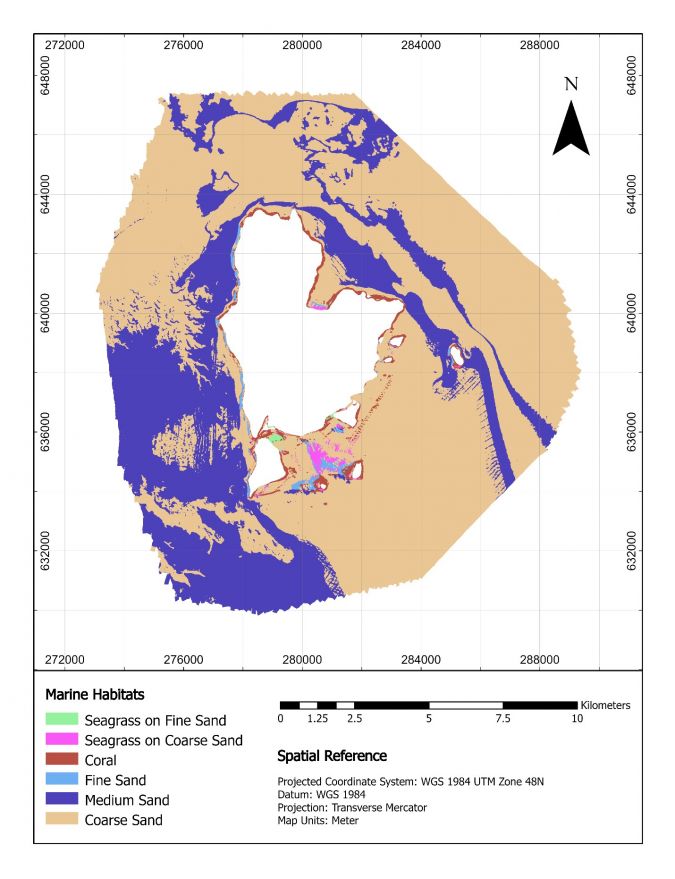
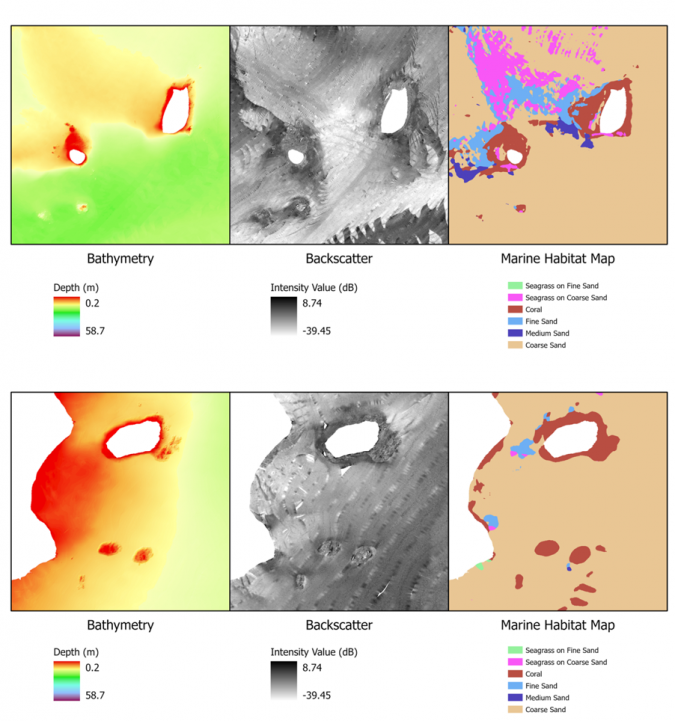
The Redang Marine Park’s final marine habitat map is depicted in Figure 2 with a spatial resolution of one metre. The distribution of marine habitats, in particular the spatial distribution of coral and seagrass beds in the region, are depicted on the map (Figure 3). For such a maritime park authority, estimating the size of the coral area is crucial since it will be used as a baseline for future planning of conservation efforts or for studying habitat changes. Seagrass beds are another important marine habitat in this region, as they provide food and shelter for marine creatures such as fish, dugongs and sea turtles. The distribution of seagrass is spatially explained by the marine habitat map, and this knowledge is crucial for determining how human activities may affect the ecosystem’s deterioration. The map also shows the different types of sediment present in the area, particularly the distribution of fine and coarse sand. Instead of detailed information on individual species (e.g. different types of corals), the map provides a broad class of maritime habitats, and is therefore useful for providing a comprehensive overview of the overall habitat in the area. The Department of Fisheries can use this information to create a conservation strategy, and it also serves as one of the main inputs for the Marine Spatial Planning of the biodiversity region in Malaysian coastal waters.
Conclusion
Hydroacoustic data from hydrographic surveying is not only useful for standard mapping purposes but can be analysed and extended to serve other purposes, in alignment with the philosophy ‘collect once, use many times’. For marine habitat mapping, hydroacoustic data alone might not be sufficient, and integration with sampling data and machine learning techniques was found to be useful. The method demonstrated in this study overcomes difficulties associated with acquiring too much sampling data over large areas. In order to ensure the dependability of the marine habitat maps created, the accuracy and requirements of the hydrography survey must be as high as possible, to ensure that all the marine habitat maps produced are free of artefacts and errors. With the current technological advancements taking place, such as the use of unmanned survey vehicles and autonomous systems, marine habitat mapping projects can be completed at a lower cost and in less time and provide more detailed information. We anticipate that, in the future, marine habitat maps will be just as crucial to hydrographic authorities as navigational charts and bathymetry data.

Value staying current with hydrography?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories from the world of hydrography to help you learn, grow, and navigate your field with confidence. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired by the latest in hydrographic technology and research.
Choose your newsletter(s)






















